Интегрирующее звено с замедлением.
Звено описывается дифференциальным уравнением
Примером такого звена является двигатель (рис.1), если в качестве выходной величины рассматривать не угловую скорость, а угол поворота, являющийся интегралом от угловой скорости. К такому же типу звена сводятся демпфер (рис.7, б), интегрирующий привод (рис.7, в), если более точно рассматривать их уравнения движения, и др.
Изодромное звено.
Звено описывается уравнением:
где T=k1/k – постоянная времени изодромного звена.
Примеры изодромных звеньев изображены на рис.8. Таким звеном может быть комбинация пружины с демпфером (рис.8, б). В качестве входной величины здесь рассматривается прикладываемая сила F, а в качестве выходной – перемещение x точки a,в которой приложена сила. Это перемещение складывается из деформации пружины

где c – жесткость пружины и перемещения поршня

где S – коэффициент скоростного сопротивления демпфера.
Результирующее перемещение точки

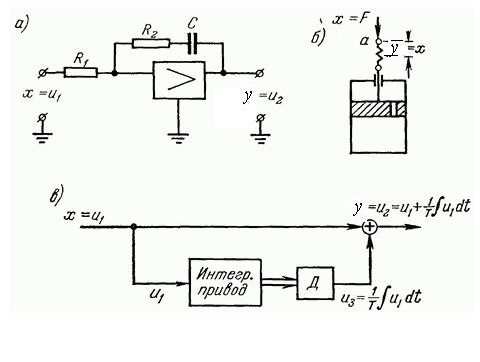
Рис. 8. Примеры изодромных звеньев
При использовании операционного усилителя (рис.8, а) изодромное звено может быть получено посредством применения RC-цепи в обратной связи.
В системах управления часто находят применение изодромные звенья, построенные на базе интегрирующего привода (рис.8, в). В этом случае входное напряжение u1 поступает непосредственно на выход. Кроме того, это же напряжение поступает на вход интегрирующего привода. Угол поворота валика последнего, в соответствии с изложенным выше, пропорционален интегралу от входного напряжения u1. На выходном валике устанавливается какой-либо датчик (Д) представляющий собой линейный преобразователь угла поворота в напряжение, например потенциометр или линейный вращающийся трансформатор. Напряжение этого преобразователя u3 суммируется с напряжением u1. Эта сумма и представляет собой входное напряжение u2.
Дифференцирующие звенья.
Дата добавления: 2022-02-05; просмотров: 983;
Поиск по сайту
Узнать еще
- Апериодическое звено
- Апериодическое звено второго порядка
- Апериодическое звено второго порядка.
- Апериодическое звено.
- Безынерционное звено.
- Буксирный трос; 2 – якорная скоба; 3 – удлиненное звено; 4 – якорная цепь; 5 – скоба; 6 – стальной трос (свистов); 7 – стопора якорной цепи.
- Верхнее звено (верхний плейстоцен).
- Дифференцирующее звено с замедлением.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
