Гидравлические приводы
Как было отмечено в § 4.1, гидроприводы нашли основное применение в роботах большой грузоподъемности, а также в роботах средней грузоподъемности, когда требуется особо качественное управление. Гидропривод состоит из тех же основных частей, что и пневмопривод. Основой его является двигатель поступательного движения (гидроцилиндр) или углового движения (поворотный гидродвигатель), которые устроены подобно аналогичным пневматическим двигателям, только вместо сжатого воздуха в них используется жидкость (обычно масло) под давлением до 20 МПа. Соответственно создается и на 2 порядка большее усилие. Несжимаемость жидкости обеспечивает гидроприводу значительно лучшие динамические и точностные характеристики по сравнению с пневмоприводом.
Управление гидравлическими двигателями осуществляется с помощью золотников и клапанов, которые имеют обычно электрическое управление, т. е. представляют собой электрогидравлические усилители (ЭГУ). Гидроприводы чаще всего выполняют с непрерывным управлением.
В отличие от пневмоприводов гидроприводы имеют свой блок питания, входящий в состав робота. Этот блок состоит из гидронасоса, фильтра, регулятора давления, устройства охлаждения (обычно водяного) и масляного аккумулятора с запасом масла.
На рис. 4.9 показан гидравлический промышленный робот, предназначенный для нанесения покрытий. Рабочим инструментом является краскораспылитель. Робот состоит из 3 частей: манипулятора, насосной станции и устройства управления (в центре).
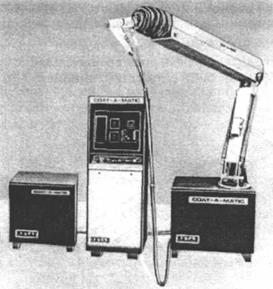
Рис.4.9. Гидравлический промышленный робот с непрерывным управлением "Коут-а-Матик" фирмы "Ретаб" (Швеция)
Гидравлическая схема робота представлена на рис. 4.11. Насосом 8 масло через обратный клапан 6 нагнетается в ресивер 23 и через фильтр высокого давления 24 попадает в напорную магистраль. Заданное давление масла поддерживается клапаном 10, управляемым реле давления 5, и контролируется по манометру 7. В случае аварийного падения давления масла в гидросистеме реле давления 5 отключает манипулятор. Из гидросистемы масло сливается в бак 9 через теплообменник 12 и фильтр 11. Насосная станция, выполненная в отдельном корпусе, соединяется с блоками распределителей, размещенными в станине, с помощью шлангов с быстроразъемными муфтами 13 и 22.
Каждый из приводов робота управляется соответствующим распределителем 3, 4, 14, 15, 16, 21. Переливные клапаны 1, 2, 17—20 при неработающем масляном насосе соединяют противоположные полости гидроцилиндров и гидродвигателей и позволяют перемещать рабочий орган в режиме обучения. При включении насоса под давлением масла клапаны переключаются и соединяют двигатели с соответствующими распределителями. В устройстве управления управляющие программы записываются на магнитном диске — для каждого привода на отдельной дорожке.
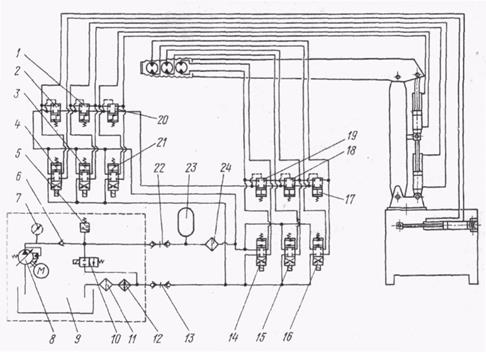
Рис. 4.11.Гидравлическая схема робота "Коут-а-Матик"
Дата добавления: 2022-02-05; просмотров: 611;
Поиск по сайту
Узнать еще
- Впускные, выпускные клапаны и седла, приводы клапанов
- Гидравлические вяжущие вещества
- Гидравлические вяжущие вещества.
- Гидравлические и комбинированные механизмы управления насосами переменной подачи
- ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ ПРИВОДЫ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ
- Гидравлические линии
- Гидравлические передаточные устройства
- Гидравлические приводы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
