Системы передвижения мобильных роботов
Системы передвижения роботов относятся к их исполнительным системам наряду с манипуляционными системами. В современных мобильных роботах нашли применение практически все известные транспортные средства. Кроме того, предметом робототехники являются различные бионические способы передвижения (локомоций), заимствованные у живой природы и не освоенные еще в технике. К ним, прежде всего, относится шагание. Основной специфической частью всех систем передвижения являются движители, преобразующие усилие от двигателей приводов в усилие, движущее систему передвижения.
По типу внешней среды средства передвижения подразделяются на наземные, водные, воздушные и космические, а по широте применения — на универсальные и специальные, предназначенные для особых условий и целей. Наземные универсальные системы передвижения — это традиционные колесные и гусеничные транспортные средства, а также шагающие(стопоходящие). Первые наземные мобильные роботы были созданы в связи с потребностью расширения рабочей зоны их манипуляторов, а также для выполнения чисто транспортных операций (внутрицеховой, складской и другой транспорт). На рис. 3.16 и 3.17 показаны примеры мобильных роботов на колесном и гусеничном ходу.
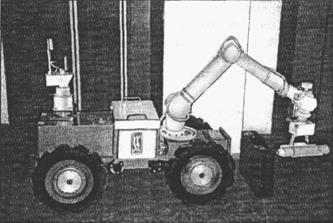
Рис. 3.16.Мобильный робот на колесном ходу (ЦНИИ РТК)
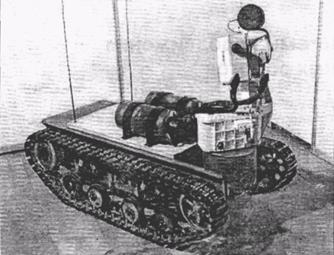
Рис.3.17. Мобильный робот на гусеничном ходу (ЦНИИ РТК)
Особый раздел робототехники составляют шагающие системы передвижения и основанные на них транспортные машины. Они являются предметом робототехники потому, что механические ноги — педипуляторы от латинского слова (pes, pedis — нога) — наиболее близки другому основному объекту робототехники — манипуляторам. Однако значение и потенциальные области применения шагающих машин выходят за пределы робототехники. Способ передвижения с помощью ног (шагание, бег, прыгание), как известно, является наиболее распространенным в живой природе. Однако в технике он еще не получил заметного применения прежде всего из-за сложности управления.

Рис. 3.19.Звено манипулятора, перемещающегося на воздушных подушках
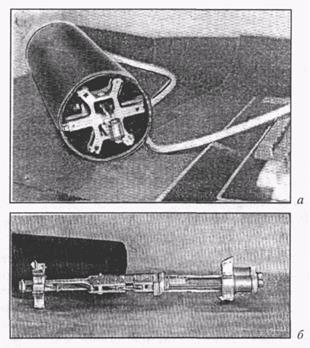
Рис. 3.20.Робот "Труболаз" для обследования трубопроводов (ЦНИИ РТК): а — внутри трубы; 6— вне трубы. Передвижение осуществляется путем поочередного закрепления концов корпуса и сокращения его длины на основе эффекта памяти формы
Развитие робототехники создало необходимую научно-техническую основу для реализации этого принципиально нового для техники способа передвижения и для создания нового типа транспортных машин — шагающих.
Шагающий способ представляет основной интерес для движения по заранее неподготовленной местности с препятствиями. Традиционные колесные и гусеничные транспортные машины оставляют за собой непрерывную колею, тратя на это значительно большую энергию, чем в случае передвижения шагами, когда взаимодействие с грунтом происходит только в местах упора стопы. Помимо этого шагающий способ передвижения обладает и большей проходимостью на пересеченной местности вплоть до возможности передвигаться прыжками, преодолевать препятствия и т. п. При шагающем способе меньше разрушается грунт, что, например, важно в тундре. При передвижении по достаточно гладким и подготовленным поверхностям этот способ уступает колесному в экономичности, скорости передвижения и простоте управления.
В задачи системы управления шагающей машины входят:
· стабилизация в процессе движения положения корпуса машины в пространстве на определенной высоте от грунта независимо от рельефа местности;
· обеспечение движения по определенному маршруту с обходом препятствий;
· связанное управление ногами, реализующее определенную походку с адаптацией к рельефу местности.
Поскольку основное назначение шагающих машин — передвижение по сильно пересеченной местности, управление ими обязательно должно быть адаптивным. В системе управления при этом выделяют обычно следующие 3 уровня управления:
· первый, нижний, уровень — управление приводами степеней подвижности ног;
· второй уровень — построение походки, т. е. координации движений ног, со стабилизацией при этом положения корпуса машины в пространстве;
· третий уровень — формирование типа походки, направления и скорости движения, исходя из заданного маршрута в целом.
Первый и второй уровни реализуются автоматически, а третий уровень осуществляется с участием человека-оператора ("водителя").
Попытки создать шагающие аппараты предпринимались давно. Одна из первых моделей стопоходящей машины была создана в прошлом веке математиком и механиком П.Л. Чебышевым. На рис. 3.21 показан четы-
На рис. 3.22 показана одна из первых разработок шагающего транспортного промышленного робота, разработанного в США для внутрицеховых работ, в частности, в металлургии. Грузоподъемность робота — 300 кг. В передней части робота — место оператора.
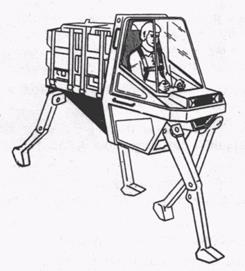
Рис. 3.22. Четырехногий транспортный робот для внутрицеховых работ

Рис. 3.24. Шестиногий шагающий аппарат с приклеивающимися стопами ног:
1 — телевизионная камера; 2 — шланг питания и управления;
3 — стопа ноги; в которую подается клейкая жидкость;
4 — одна из поднятых ног; 5 — корпус
Водные системы передвижения роботов основаны на традиционных средствах водного транспорта. На рис. 1.7 (см. главу]) был показан один из первых отечественных подводных роботов "Манта", в котором использованы винтовыедвижители для погружения, поступательного движения и маневрирования. Такие же движители применяются и во всех последующих конструкциях подводных роботов. Их типовая система передвижения включает 1 или 2 вертикально направленных движителя заглубления и 2 или 3 поворотных движителя, создающих управляемый по направлению и величине продольный вектор тяги для поступательного движения аппарата. Двигатели, входящие в состав этих движителей, — обычно электрические, постоянного тока.
Воздушные системы передвижения, как и водные, развиваются по 2 направлениям: во-первых, используются давно освоенные в авиации способы полета, а, во-вторых, ведутся исследования по освоению машущих способов полета, известных в живой природе. На рис. 3.26 показан один из экспериментальных образцов подобного аппарата.
Космические системы передвижения разделяются на системы для свободно летающих роботов, для роботов, обслуживающих космические аппараты (снаружи и внутри), и для напланетных роботов. На рис. 3.27 показан пример конструкции свободнолетающего робота. Он имеет двигательную установку с системой двигателей, создающих усилие по отдельным степеням подвижности робота, систему питания двигателей с топливными баками, два манипулятора, навигационную систему, систему ориентации робота, систему радиосвязи, телевизионную систему, включающую две неподвижные и одну подвижную передающие телеви-
На рис. 3.28 приведен образец космического шагающего робота для наружного обслуживания орбитальных космических станций. Он представляет собой манипулятор, оба конца которого являются рабочими органами в виде стыковочного устройства. С их помощью манипулятор шагает по расположенным на поверхности обслуживаемого объекта такелажным элементам, через которые он получает электроэнергию и осуществляет связь с пультом управления.
Рис. 3.28.Космический шагающий робот "Циркуль"
для наружного обслуживания орбитальных станций (ЦНИИ РТК):
I — модуль управления шарниром; 2 — вращающийся токосъемник;
3 — телевизионная камера; 4 — стыковочное устройство; 5 — такелажный элемент; 6 — привод (бесколлекторный двигатель; тормоз; инкрементный датчик);
7 — переносный пульт управления
На рис. 3.29 показан один из вариантов отечественных напланетных роботов. Он имеет восьмиколесное шасси, где у каждого колеса свой электрический привод (мотор-колесо). На рис. 3.30 показано шасси "Марсо-хода", разработанного по международной программе "Марс-96". Шасси имеет значительно большую проходимость, чем у его предшественников "Луноходов", за счет изменяемой конфигурации. Оно реализовано на трехосной схеме со свободной подвеской осей, 6 индивидуально управляемыми мотор-колесами в форме усеченных конусов и 2 механизмами шагания.

Рис. 3.29. Напланетный космический аппарат "Луноход"
Сенсорные системы
Сенсорные системы предназначены для получения информации о внешней среде и положении робота в ней. В отдельных системах роботов имеются также различные чувствительные устройства — датчики, необходимые для функционирования этих систем (например, датчики обратной связи в приводах, во вторичных источниках питания и т. п.). Эти устройства, ориентированные на внутренние параметры робота, не специфичны для него в целом и не относятся к сенсорным системам робота.
По выявляемым свойствам и параметрам сенсорные системы можно разделить на следующие 3 группы.
1. Системы, дающие общую картину окружающей среды с последующим
выделением отдельных объектов, значимых для выполнения роботом
его функций.
2. Системы, определяющие различные физико-химические свойства
внешней среды и ее объектов.
3. Системы, определяющие координаты местоположения робота и параметры его движения, включая его координаты относительно объектов внешней среды и усилия взаимодействия с ними.
К сенсорным системам первой группы относятся системы технического рения и различного типа локаторы. Вторая группа сенсорных систем наиболее многообразна. Это измерители геометрических параметров, плотности, температуры, оптических свойств, химического состава и т. д. Третья группа сенсорных систем определяет параметры, относящиеся к самому роботу. Это измерители его географических координат в пространстве от спутниковых систем до использующих магнитное поле Земли, измерители угловых координат (гироскопы), измерители перемещения и скорости, в том числе и относительно отдельных объектов внешней среды вплоть до фиксации соприкосновения с ними.
Сенсорные системы, используемые в системах передвижения робота, подразделяются на системы, обеспечивающие навигацию в пространстве и системы, обеспечивающие безопасность движения (предотвращение столкновений с препятствиями и опрокидываний на уклонах, попадания в недопустимые для робота внешние условия и т. п.).
Сенсорные системы, обслуживающие манипуляторы, тоже образуют две подгруппы: системы, входящие в контур управления движением манипулятора, и системы, очувствления его рабочего органа. В число последних систем часто входят размещенные у рабочего органа манипулятора системы технического зрения и измерители усилий.
Контактные сенсорные системыприменяются для очувствления рабочих органов манипуляторов и корпуса (бампера) мобильных роботов. Они позволяют фиксировать контакт с объектами внешней среды (тактильные сенсоры), измерять усилия, возникающие в месте взаимодействия (сило-моментные сенсоры), определять проскальзывание объектов при их удержании захватным устройством. Контактным сенсорным системам свойственна простота, но они накладывают существенные ограничения на динамику и прежде всего на быстродействие управления роботом.
Тактильные сенсоры помимо получения информации о контакте применяются и для определения размеров объектов (путем их ощупывания). Они реализуются с помощью концевых выключателей, герметизированных магнитоуправляемых контактов, на основе токопроводящей резины ("искусственная кожа") и т. д. Важным требованием, предъявляемым к этим устройствам, является высокая чувствительность (срабатывание при усилии в единицы и десятки грамм), малые габариты, высокая механическая прочность и надежность.
В бесконтактных сенсорных системах для получения требуемой информации используются излучаемые ими специальные сигналы (оптические, радиотехнические, ультразвуковые и т. д.) и естественные излучения среды и ее объектов.
В настоящее время для очувствления роботов наиболее широкое применение получили системы технического зрения, локационные, сило-моментные и тактильные. Наиболее универсальными из них являются системы технического зрения. Как было отмечено в § 1.2, развитие систем технического зрения и использующих их очувствленных роботов стало одним из определяющих направлений современной робототехники. При этом наряду с изучением и использованием методов решения этой задачи, присущих живой природе, широким фронтом ведутся разработки технических решений, не имеющих аналогов в природе. По сравнению со зрением живых организмов задачи технического зрения проще, так как для них, как правило, существенно более ограничен и заранее известен перечень объектов внешней среды, с которыми предстоит иметь дело. Часто также существует возможность специально организовать внешнюю среду для облегчения работы видеосистем. Например, для распознавания объектов можно маркировать их, применять контрастирующие с объектами поверхности, на которых они расположены, специальные системы освещения и т. д.
Зрительная информация обрабатывается иерархически на нескольких уровнях аналогично тому, как это происходит в живых организмах (см. главу 2). В аппаратной реализации эти уровни образуют 2 основных этапа обработки информации. Первый этап — предварительная обработка первичной зрительной информации с целью сокращения объема информации с выделением только той, которая необходима для функционирования робота при выполнении им конкретных операций.
ПРИВОДЫ РОБОТОВ
Дата добавления: 2022-02-05; просмотров: 906;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
