Электрические приводы
В промышленных роботах нашли применение электроприводы следующих типов:
· на двигателях постоянного тока традиционных коллекторных и бес
коллекторных (вентильных);
· на асинхронных двигателях как нерегулируемых (с цикловым управ
лением), так и с частотным управлением;
· на шаговых двигателях;
· на различного типа регулируемых муфтах в сочетании с нерегулируемым асинхронным двигателем или двигателем постоянного тока;
· на электромагнитах (соленоидных и других типов).
В основном применяются традиционные электроприводы с угловым перемещением, т. е. вращающиеся. Однако в роботах с поступательными перемещениями наряду с вращающимися двигателями в комбинации с механизмами, преобразующими вращательное движение в поступательное (типа передачи шестерня-рейка и т. п.), нашли применение и специальные линейные приводы постоянного и переменного тока.
Электроприводы для роботов в общем случае включают электродвигатель, снабженный датчиками обратной связи по положению и скорости, механическую передачу, часто тормоз, иногда муфту (например, для защиты двигателя от перегрузки) и устройство управления.
К перспективным разработкам электрических приводов для роботов относятся высокомоментные безредукторные двигатели, приводы с непосредственным цифровым управлением и бездатчиковые приводы с расчетом значений перемещения и скорости по измеряемым электрическим переменным двигателя.
Примеры электромеханических промышленных роботов были приведены на рис. 3.6 и 3.8. На рис. 4.12 показан внешний вид электромеханического промышленного робота ИРб-6, устройство которого было приведено на рис. 3.6.
Устройство управления робота выполнено на микроЭВМ с записью управляющих программ на магнитной ленте. Программирование выполняется обучением с помощью переносного пульта. Робот может функционировать в режимах непрерывного и дискретного позиционного управления и комплектоваться различными сенсорными системами, включая систему технического зрения и сило-моментный сенсор. Благодаря своим широким функциональным возможностям ИРб-6 нашел применение как универсальный робот для выполнения многих основных технологических операций (дуговая и точечная сварка, механическая сборка, очистка отливок) и обслуживания станков и другого технологического оборудования, прежде всего, в автомобильной промышленности.
Рис. 4.12. Электромеханический промышленный робот ИРб-6 фирмы АСЕА (Швеция)
Микроприводы
Развитие микроробототехники в первую очередь потребовало создания соответствующих микроприводов. Для этого наряду с традиционными принципами действия и конструкциями, созданными в рамках традиционного точного машиностроения, были разработаны совершенно новые приводы для микроперемещений, основанные на использовании управляемых гибких деформаций (см. рис. 3.10). Одним из таких перспективных типов микроприводов являются пъезоприводы. На рис. 4.18, а показана схема основного элемента такого привода — пьезопреобразователя электрической энергии в энергию механического перемещения [12]. Он представляет собой пакет из пьезокерамических шайб 1 с нанесенными на торцы серебряными электродами, на которые параллельно подается электрическое напряжение. При этом за счет обратного пьезоэлектрического эффекта происходит увеличение или уменьшение толщины шайб в зависимости от полярности приложенного напряжения. На рис. 4.18, б показан другой тип таких преобразователей, основанный на изгибных деформациях многослойных пластин из пьезоэлектрических и пассивных металлических или полимерных слоев. Такие преобразователи имеют больший ход, чем использующие деформацию расширение-сжатие, но худшие точностные и силовые параметры.
Величина перемещения на выходе таких электромеханических преобразователей (ход) — до десятых долей мм; скорость — до 1—2 м/с, погрешность управляемого позиционирования — доли мкм, усилие— сотни Н, мощность — десятки Вт. Из таких преобразователей создаются трехстепенные микроманипуляционные системы. Они часто комбинируются с обычными электромеханическими манипуляционными системами, обеспечивающими перемещение в десятки мм с погрешностью, перекрываемой микроманипуляционной системой. Получается манипулятор, состоящий из последовательно соединенных систем грубого и точного позиционирования, рабочий ход которого определяется первой системой, а точность— второй.
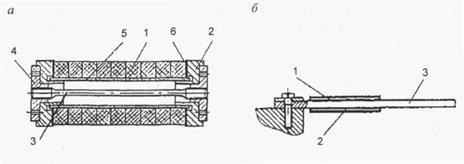
Рис. 4.18.Пьезоэлектрические преобразователи микроприводов:
а — с поступательной деформацией растяжение-сжатие: 1—секция пьезокерамических шайб, 2 — фланец, 3 — шпилька, 4 — гайка, 5 — пластмассовая втулка, 6 — слюдяная шайба;
б— с изгибной деформацией: 1, 2 — пьезоэлектрические пластины, 3 — металлическая рессора
Помимо пьезоэлектрических существуют микроприводы и других типов — пьезомагнитные, электро- и магнитострикционные, биметаллические, на эффекте памяти формы, электростатические, принцип действия которых описан в § 4.7, пневматические, гидравлические [12].
Для мобильных микророботов, предназначенных для передвижения в узких полостях (тонкие трубопроводы, желудочно-кишечный тракт, кровеносные сосуды человека и т. п.), разработаны специальные микродвижители, реализующие способ передвижения, подобный используемому гусеницами и червями. Вариант такой системы передвижения на пьезоприводах состоит из нескольких пьезоэлектрических сегментов, соединенных центральным стержнем из того же материала. Попарно расширяющиеся за счет пьезоэффекта сегменты выполняют функции фиксаторов, а поступательное перемещение осуществляется путем удлинения центрального стержня. Частота импульсов движения—10—20 МГц.
Существуют аналогичные системы, основанные на пневматике. На переднем и заднем концах такого микроробота имеются пневмофиксаторы, которые попеременно закрепляются на стенках полости. При этом корпус робота также попеременно удлиняется при закрепленном заднем и сокращается при закрепленном переднем конце. Для передвижения подобных роботов используется и управляемое внешнее силовое магнитное поле [13].
Основные уже определившиеся области применения микроприводов и основанных на них микроманипуляторов и микророботов — это микрооперации в промышленности (микрообработка, сборка, сварка и т. п.), биологические и фармакологические технологии, медицина (осмотр внутренностей, доставка туда лекарств, хирургические операции).
Дата добавления: 2022-02-05; просмотров: 932;
Поиск по сайту
Узнать еще
- Б. Дипольные электрические зондирования: экваториальные, азимутальные и осевые
- Бесконтактные коммутационные электрические аппараты
- В системе передачи звуковых сообщений используются соответственно акустоэлектрические и электроакустические преобразователи.
- Вертикальные электрические зондирования
- Вихревые электрические поля и токи
- Вопрос № 3. Магнитоэлектрические механизмы.
- Впускные, выпускные клапаны и седла, приводы клапанов
- Газообразные диэлектрические материалы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
