Пневматические приводы
В пневмопривод одной степени подвижности входят двигатель, распределительное устройство и регулятор скорости. Двигатель может быть поступательного движения — пневмоцилиндр и поворотный. Пневмоцилиндр состоит из гильзы, выполненной из прецизионной трубы обычно с фторопластовой накладкой внутри, поршня с уплотнением, которое имеет малое трение по фторопласту, и штока. К пневмоцилиндру часто пристроен тормоз, включающийся в конце хода поршня. Поршень со штоком, который присоединен к нагрузке двигателя, движется под действием сжатого воздуха, подаваемого в полость цилиндра с одной стороны поршня. Полость, расположенная с другой стороны поршня, соединяется при этом с атмосферой для выпуска воздуха, сжимаемого движущимся поршнем. Направление движения поршня со штоком зависит от того, с какой стороны от поршня подается сжатый воздух.
Поворотные пневматические двигатели, применяемые в роботах, имеют ограниченный угол поворота (неполноповоротные двигатели). Их подвижная часть представляет собой лопасть, укрепленную на выходном валу и расположенную в кольцеобразном корпусе. Внутри корпуса имеется перегородка, с двух сторон которой получаются полости для воздуха, разделенные подвижной лопастью.
Распределительное устройство пневмопривода служит для управления подачей воздуха в двигатель. Выполняют его из золотников или клапанов обычно с электромагнитным приводом, управляющие сигналы на которые поступают от устройства управления робота.
Регулятор скорости поддерживает заданную скорость движения привода путем стабилизации расхода воздуха, подаваемого в двигатель (например, с помощью дросселя с обратным клапаном).
Пневматические двигатели работают на сжатом воздухе давлением 0,3— 0,6 МПа. Сжатый воздух поступает на приводы от общего блока питания, который состоит из аппаратуры подготовки воздуха и редуктора. Подготовка воздуха заключается в его очистке от влаги и механических примесей и внесении распыленного масла для смазки трущихся поверхностей в двигателе. Редуктор обеспечивает поддержание определенного давления воздуха на входе привода.
Сжатый воздух на вход блока питания поступает обычно из общей пневмосети предприятия, в которую он подается от компрессора (компрессорной станции). В мобильных роботах воздух поступает из баллонов, в которых он находится под повышенным давлением.
Как было указано, в настоящее время подавляющее большинство пневмоприводов роботов имеют простейшее цикловое управление (по упорам). При таком управлении привод перемещается из начального положения сразу в конечное, которое определяется механическим упором, установленным на подвижной части привода (на штоке пневмоцилиндра или выходном валу поворотного двигателя). Упор находит на демпфер, который гасит энергию движения, обеспечивая безударное торможение привода. Одновременно с этим прекращается подача воздуха в двигатель. Демпферы в основном гидравлические, а для маломощных приводов — более простые пружинные. Прибегают также к способу торможения противодавлением, при котором демпфер не требуется, а торможение происходит за счет переключения подачи воздуха в момент торможения изодной полости двигателя в другую, выхлопную полость, т. е. встречно движению поршня (или лопасти в поворотном двигателе).
На рис. 4.4 показан один из первых отечественных серийных пневматических промышленных роботов МП-9С (разработчик — ЦНИИ РТК, производитель — АвтоВАЗ). Робот получил широкое применение на сборочных операциях и для обслуживания прессов.
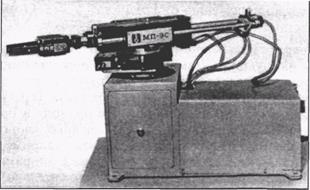
Рис. 4.4. Пневматический промышленный робот МП-9С
Пневматическая схема робота МП-9С представлена на рис. 4.6. Воздух из магистрали через запорный муфтовый вентиль 1, влагоотделитель 2, регулятор давления 3 и маслораспылитель 5 поступает к электропневматическим нормально закрытым клапанам 7—13. Давление в системе контролируется с помощью технического манометра 4.
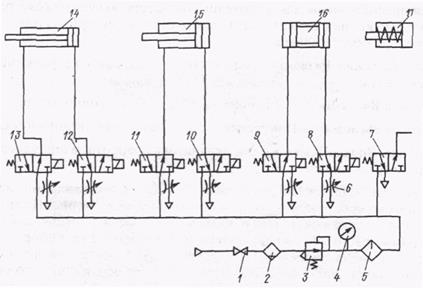
Рис. 4.6. Пневматическая схема промышленного робота МП-9С
При включении клапана 7 воздух поступает в пневмоцилиндр 17 схвата. Пальцы схвата сближаются и зажимают деталь. При отключении клапана 7 воздух из пневмоцилиндра 17 стравливается в атмосферу и поршень под действием пружины возвращается в исходное положение. При включении клапанов 8, 10, 12 воздух поступает соответственно к пневмоцилиндрам поворота манипулятора 16, подъема манипулятора 15, выдвижения захватного устройства 14, а через клапаны 9, 11, 13 и дроссели 6 стравливается в атмосферу. С помощью дросселей 6 регулируется скорость поршней пневмоцилиндров и, соответственно, звеньев манипуляторов.
Устройство управления робота МП-9С выполнено, как уже было отмечено, в виде отдельной стойки и состоит из 2 частей. В нижней части расположены блок подготовки воздуха и электроуправляемые воздухораспределители. На боковую поверхность стойки выведены штуцеры для подсоединения к пневмоцилиндрам манипулятора. Верхняя часть содержит электронные блоки и лицевую панель устройства. На лицевой панели (рис. 4.7) расположены элементы ручного управления приводами робота и ряд плоских многопозиционных переключателей, на которых набирается программа рабочего цикла робота и технологического оборудования. С помощью кнопок Пуски Стоппроизводятся запуск и остановка манипулятора в автоматическом режиме. Кнопки Автомати Наладкапредназначены для включения соответствующего режима работы. Остальные кнопки служат для ручного управления приводами манипулятора в режиме "Наладка":
· кнопка Зажим-Разжим— соответственно для сжатия и разжима пальцев схвата;
· кнопка Вверх-Вниз— для подъема и опускания манипулятора;
· кнопка Выдвижение-Втягивание— для выдвижения и втягивания схвата;
· кнопка Вправо-Влево— для включения поворота манипулятора вокруг вертикальной оси.
Кнопки снабжены сигнальными лампочками, высвечивающими заданные команды во всех режимах работы приводов манипулятора. На многопозиционных переключателях, показанных на рис. 4.7 сверху, набирается программа работы робота и другого работающего с ним оборудования. Каждая позиция переключателя соответствует одной команде на перемещение какого-либо одного звена манипулятора или одной команде на включение внешнего технологического оборудования. В устройстве управления применены десятипозиционные переключатели, позиции которых соответствуют следующим командам: конец цикла (программы); выдвижение схвата; втягивание схвата; поворот манипулятора вправо; поворот манипулятора влево; подъем манипулятора; опускание манипулятора; зажим пальцев схвата; разжим пальцев схвата; пуск технологического оборудования.

Рис. 4.7. Лицевая панель устройства управления промышленного робота МП-9С
Дата добавления: 2022-02-05; просмотров: 583;
Поиск по сайту
Узнать еще
- Впускные, выпускные клапаны и седла, приводы клапанов
- Газомоторные пневматические двигатели
- ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ ПРИВОДЫ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ
- Гидравлические приводы
- Гидравлические приводы
- Гидравлические приводы промышленных роботов
- Гидравлические следящие приводы (гидроусилители)
- Гидроприводы вращательного движения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
