Рабочие органы манипуляторов
Рабочие органы манипуляторов служат для непосредственного взаимодействия с объектами внешней среды и делятся на захватные устройстваи специальный инструмент. Рабочие органы могут быть постоянными и съемными, в том числе с возможностью их автоматической замены входе выполнения технологической операции.
Захватные устройства.Они предназначены для того, чтобы брать объект, удерживать его в процессе манипулирования и освободить по окончании этого процесса. Существуют следующие основные типы захватных устройств: механические устройства-схваты, пневматические и электромагнитные. Кроме того, в связи с большим разнообразием объектов манипулирования разработано большое количество различных комбинаций этих типов захватных устройств и множество специальных захватных устройств, основанных на различных оригинальных принципах действия (например, клейкие захватные устройства, накалывающие, использующие аэродинамическую подъемную силу и т. п.).
Схват — это механическое захватное устройство, аналог кисти руки человека. Самые простые двухпальцевые схваты напоминают обычные плоскогубцы, но снабженные приводом. На рис. 3.13 показана конструкция подобного схвата с пневматическим приводом. В зависимости от объектов манипулирования применяют схваты с 3, 4 и реже с большим числом пальцев. На рис. 3.14 показан сложный схват с 3 пальцами, каждый из которых имеет по 3 подвижных звена и может также поворачиваться относительно продольной оси. Здесь использован эффект памяти формы, проиллюстрированный на рис. 3.10, б. Однако в связи с простотой совершаемых схватами движений ("зажим-разжим") в них обычно используются нерегулируемые пневматические и электрические приводы, значительно реже — гидравлические.
На рис. 3.15 показан пневматический схват с 5 гибкими надувными пальцами. За счет разной жесткости пальцев в сечении при подаче в них сжатого воздуха они изгибаются, захватывая находящиеся в их зоне предметы.
Схваты часто очувствляют с помощью контактных датчиков, датчиков проскальзывания, усилия и дистанционных датчиков (ультразвуковых, оптических и др.), выявляющих предметы вблизи схвата и между его пальцами.
В наиболее распространенном типе вакуумного захватного устройства использованы вакуумные присоски, которые удерживают объекты за счет разряжения воздуха при его отсосе из полости между присоской и захватываемым объектом. Для захватывания объектов сложной формы применяют вакуумные захватные устройства с несколькими присосками.
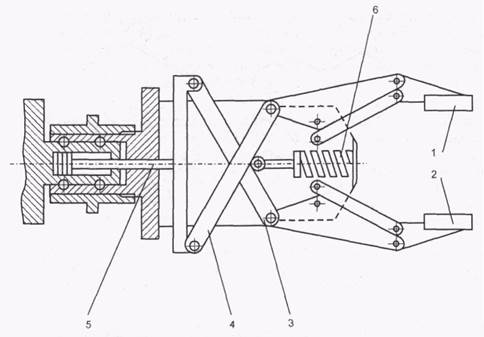
Рис. 3.13. Двухпальцевый схват: 1; 2 — пальцы (губки);
3; 4 — рычажная передача; 5 — шток пневматического двигателя
 |
(пневмоцилиндра); 6 — возвратная пружина.
Рис. 3.15. Пневматический схват с 5 гибкими надувными пальцами:
а — внешний вид; б — разрез пальца; 1 — тонкостенная часть;
2 — гофры; 3 — толстостенная часть; 4 — подвод воздуха;
5 — деформация оси пальца при подаче сжатого воздуха
Магнитныезахватные устройства используются для взятия ферромагнитных объектов. В роботах нашли применение в основном захватные устройства с электромагнитами, но имеются устройства и с постоянными магнитами. (Для освобождения захваченного предмета они снабжены специальными механическими выталкивателями.)
Захватные устройства бывают универсальными и специальными (для работы с хрупкими и протяженными предметами, тканями и т. д.).
Захватные устройства часто присоединяют к последнему звену манипулятора через промежуточные, податливые конструктивные элементы. С их помощью осуществляется компенсация возможных неточностей позиционирования и устраняются возникающие при этом механические напряжения в звеньях манипулятора в случаях манипулирования объектами, на перемещение которых наложены механические ограничения (механическая сборка и разборка, установка заготовок в зажимы и гнезда технологического оборудования, перемещение предметов по направляющей и т. п.).
Рабочий инструмент. Вслучаях, когда объектом манипулирования является рабочий инструмент, с помощью которого робот выполняет определенные технологические операции (нанесение покрытий, сварка, завинчивание гаек, зачистка поверхностей и т. п.), этот инструмент, как правило, не берется захватным устройством, а непосредственно крепится к манипулятору вместо него. Часто при этом к инструменту необходимо обеспечить подвод энергии или какого-либо рабочего тела. Для окрасочного робота — это краска и воздух к пульверизатору, для сварочного робота — сварочный ток к сварочным клещам при точечной сварке или проволочный электрод, газ и охлаждающая вода при дуговой сварке и т. д. Для этого требуется разработка специальной конструкции всего манипулятора.
Дата добавления: 2022-02-05; просмотров: 586;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- V. Органы осуществляющие правосудие
- А 2.3 Рабочие журналы
- Автоматизированные рабочие места, назначение и их виды
- Автоматизированные рабочие места: назначение, состав, виды обеспечения
- Анализ информации, выводимой на автоматизированные рабочие места эксплуатационного персонала
- Анализ требований и другие рабочие потоки программной инженерии
- Вегетативные органы растений.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
