Гидравлические приводы промышленных роботов
Электрогидравлические приводы широко используются в ПР большой (50—100 кг) и сверхбольшой (более 100 кг) грузоподъемности. В последнее время наблюдается тенденция использования в ПР большой грузоподъемности как гидроприводов, так и электроприводов [3], особенно на нижнем пределе грузоподъемности (до 80 кг).
Особенностями ПР большой и сверхбольшой грузоподъемности являются наличие не только значительной полезной нагрузки, но и преобладание в ней инерционных нагрузок от подвижных звеньев робота. Именно при таком характере нагрузок проявляются преимущества гидроприводов перед электроприводами в обеспечении высоких значений динамических характеристик. Кроме того, больше проявляются преимущества гидроприводов в энергетических характеристиках, за счет которых обеспечивается значительное снижение массы робота.
Как известно, гидроприводы реализуются тремя различными схемами:
— с постоянными давлением рабочей жидкости в системе и производительностью гидравлического насоса;
— с постоянным давлением рабочей жидкости в системе и переменной производительностью гидравлического насоса;
— с переменными давлением рабочей жидкости в системе и производительностью гидравлического насоса.
Первые две схемы реализации называют гидроприводами дроссельного управления соответственно с гидравлическим насосом постоянной и переменной производительности, а третью – гидроприводом объемного управления.
В дальнейшем для упрощения термин «электрогидравлический привод» заменен на термин «гидропривод».
В существующих ПР применяют преимущественно первые две схемы и практически не применяют третью.
Отношение грузоподъемности к собственной массе у современных ПР сверхбольшой грузоподъемности составляет примерно 0,5. С уменьшением грузоподъемности это отношение снижается до 0,03.
Для ПР большой грузоподъемности это отношение составляет примерно 0,1. Поэтому инерционные нагрузки на гидропривод в таких роботах могут быть приблизительно в 10 раз больше, чем инерционность полезной нагрузки, а силовые нагрузки полностью определяются грузоподъемностью.
В ПР с гидроприводами используются замкнутые аналоговые и цифровые системы программного управления-контурные и позиционные. В некоторых роботах применяются оба исполнения системы программного управления – контурное и позиционное. Позиционные системы управления с гидроприводом имеют особенность в конструкции золотниковых распределителей – существенно нелинейное изменение площади проходного сечения по ходу золотника с целью обеспечения плавной остановки подвижных частей привода при позиционировании.
Как правило, ПР с гидроприводами имеют универсальное применение, манипуляторы снабжаются шестью степенями подвижности вращательного и поступательного действия с точностью позиционирования до ±0,5 мм и объемами рабочих зон более 30 м3.
Следящие гидроприводы дроссельного управления наиболее широко распространены в промышленном роботостроении, благодаря простой конструкции, а следовательно, высокой надежности и относительно малой стоимости.
Изменение скорости движения подвижного элемента гидродвигателя осуществляется за счет дросселирования потоков рабочей жидкости на входе или выходе исполнительного двигателя или за счет сочетания этих способов дроссельного управления. При этом система из нескольких следящих гидроприводов питается рабочей жидкостью от одного гидронасоса постоянной или переменной производительности. Дросселирование потоков рабочей жидкости осуществляется изменениями проходных сечений золотникового распределителя, определяемых положением кромок золотника относительно проточек золотниковой втулки. Скорость перемещения гидродвигателя тем выше, чем больше проходное сечение золотникового распределителя, т. е. больше смещение золотника относительно золотниковой втулки.
Наибольшее распространение в промышленной робототехнике получила схема гидроприводов дроссельного управления с гидронасосом постоянной производительности и постоянным давлением в системе.
Особенность схемы, изображенной на рис. 3.3, состоит в том, что гидронасос постоянной производительности снабжает рабочей жидкостью имеющихся потребителей и его производительность равна сумме максимальных расходов потребителей. В том случае, если один или несколько потребителей не расходуют рабочую жидкость, ее избыток перепускается в сливную магистраль через переливной клапан. При этом потенциальная энергия рабочей жидкости высокого давления переходит в тепловую энергию, нагревая жидкость. Золотниковые распределители, которые управляют гидроцилиндрами и гидромоторами, также превращают часть потенциальной энергии рабочей жидкости высокого давления в тепловую энергию.
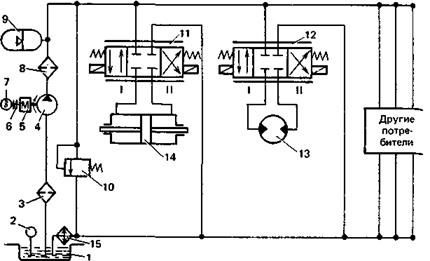
Рис. 3.3. Обобщенная функциональная схема гидроприводов дроссельного управления с гидронасосом постоянной производительности:
1 – бак; 2 – температурное реле; 3 – заборный фильтр; 4 – гидронасос постоянной производительности; 5 – электродвигатель; 6 – упругая муфта; 7 – вентилятор; 8 – фильтр тонкой очистки; 9 – пневмогидравлический аккумулятор; 10 – переливной клапан; 11 – золотниковый распределитель гидроцилиндра; 12 – золотниковый распределитель гидромотора; 13 – гидромотор; 14 – гидроцилиндр; 15 – теплообменник
Энергетические характеристики рассматриваемой схемы низкие, значительное количество потенциальной энергии рабочей жидкости высокого давления превращается в тепловую энергию, электромотор и гидронасос имеют завышенные мощность и массу. Для поддержания температуры рабочей жидкости и всей конструкции в допустимых пределах (до +80 °С) используют избыточную рабочую жидкость в системе и ее охлаждение с помощью теплообменника и вентилятора.
Для некоторого сокращения дросселирования рабочей жидкости через переливной клапан занижается производительность гидронасоса, а кратковременный избыточный расход обеспечивается пневмогидравлическим аккумулятором. Однако такие меры снижают давление в нагнетающей магистрали, ограничивают длительность совместной работы гидродвигателей, усложняют расчет системы и ограничивают возможные варианты ее использования. Кроме того, заметного улучшения энергетических характеристик не получается.
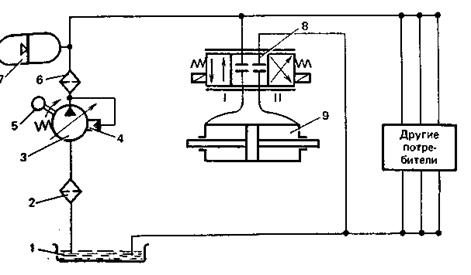
Рис. 3.4. Обобщенная функциональная схема гидроприводов дроссельного управления с гидронасосом переменной производительности:
1 – бак; 2 – заборный фильтр; 3 – гидронасос переменной производительности; 4 – регулятор производительности насоса; 5 – электродвигатель; 6 – фильтр тонкой очистки; 7 – пневмогидравлический аккумулятор; 8 – золотниковый распределитель; 9 – гидроцилиндр
Особенность схемы, применяемой в роботах сверхбольшой грузоподъемности и изображенной на рис. 3.4, состоит в том, что в ней имеется гидронасос переменной производительности, который по давлению в магистрали нагнетания изменяет производительность.
Дата добавления: 2022-02-05; просмотров: 708;
Поиск по сайту
Узнать еще
- Базы данных в SCADA. Особенности промышленных баз данных. Microsoft SQL-сервер. Основные характеристики.
- Ввод в эксплуатацию газового оборудования промышленных предприятий
- ВИДЫ ВОЗМОЖНОГО ДЕЙСТВИЯ ПРОМЫШЛЕННЫХ ЯДОВ
- Виды манипуляторов и промышленных роботов
- Виды промышленных ассоциаций (объединений)
- Виды стен промышленных зданий
- Визуальное обследование кирпичных стен и столбов жилых, общественных и промышленных зданий
- Визуальные методы обследования железобетонных конструкций в жилых, общественных и промышленных зданиях

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
