Временные характеристики САУ
Наиболее наглядное представление о динамических свойствах элемента дает его переходная функция (характеристика). Переходной функцией h(t) называют изменение выходной величины y(t) во времени, возникающее после подачи на вход единичного ступенчатого воздействия, при нулевых начальных условиях (рис. 21):

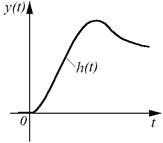
Рисунок 21
Переходная функция может быть задана в виде графика (тогда она называется характеристикой) или в формульном виде.Переходная функция h(t), как и любое решение неоднородного дифференциального уравнения имеет 2 составляющие: вынужденную  и свободную
и свободную  . Вынужденная составляющая переходного процесса представляет собой частное решение исходного уравнения. При ступенчатом воздействии вынужденная составляющая равна установившемуся значению выходной величины, которое для статических элементов может быть найдено непосредственно из дифференциального уравнения (при нулевых производных):
. Вынужденная составляющая переходного процесса представляет собой частное решение исходного уравнения. При ступенчатом воздействии вынужденная составляющая равна установившемуся значению выходной величины, которое для статических элементов может быть найдено непосредственно из дифференциального уравнения (при нулевых производных):
 .
.
Свободная составляющая может быть найдена как решение соответствующего однородного дифференциального уравнения в следующем виде (при отсутствии одинаковых корней):
 ,
,
где  - корни характеристического уравнения
- корни характеристического уравнения
 - постоянные интегрирования, зависящие от начальных условий.
- постоянные интегрирования, зависящие от начальных условий.
Характеристическое уравнение, соответствующее определенному дифференциальному уравнению, представляет собой алгебраическое уравнение, степень и коэффициенты которого совпадают с порядком и коэффициентами левой части этого дифференциального уравнения. Для дифференциального уравнения

характеристическое уравнение имеет вид

где  - некоторое комплексное число, являющееся решением (корнем), характеристического уравнения.
- некоторое комплексное число, являющееся решением (корнем), характеристического уравнения.
Импульсной переходной функцией (функцией веса) w(t) называют изменение выходной величины y(t), возникающее после подачи на вход дельта-функции, при нулевых начальных условиях (см. рис. 22).
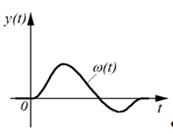
Рисунок 22
Импульсная переходная функция w(t) равна производной от переходной функции h(t):
 ,
,
и наоборот, переходная функция равна интегралу от импульсной переходной:
Переходные характеристики h(t) и w(t) называют временными.
Зная переходную или весовую функцию САУ, можно определить реакцию системы на произвольное входное воздействие при ННУ с помощью следующих формул:
 .
.
Две рассмотренные формулы легко получаются друг из друга, являясь вариантами интеграла Дюамеля, или интеграла свертки. Для реальных инерционных звеньев реакция на выходе всегда отстает от входного воздействия, т.е.  .
.
3.1 Линеаризация дифференциальных уравнений.
Методология математического описания САУ.
1. Система рассматривается как цепь взаимодействующих (физически и информационно) элементов, которая обладает способностью передавать физические воздействия и информационные сигналы в одном, строго определенном направлении.
2. Каждый конструктивный элемент рассматривается как преобразователь входного воздействия в выходную реакцию.
3. На основе априорных сведений о физической природе каждого элемента и закономерностях его функционирования составляется математическая модель, которая на языке соответствующей научной дисциплины отражает существенные для данной цепи взаимосвязи между входными и выходными переменными элемента.
4. При составлении математического описания всегда приходится прибегать к некоторой идеализации реальных процессов, определенным упрощениям, отбрасыванию второстепенных факторов. Удачность и допустимость этих упрощений зависят от глубины знаний исследователя системы в данной области физики и технологии, его инженерной интуиции и всегда подлежат экспериментальной проверке.
Во многих случаях нелинейные дифференциальные уравнения можно линеаризовать, т.е. заменить исходные нелинейные уравнения линейными, приблизительно описывающими процессы в системе.
Линеаризацию гладких статических характеристик можно осуществить либо по методу касательной, либо по методу секущей.
Пусть дана нелинейная характеристика (рис. 23).
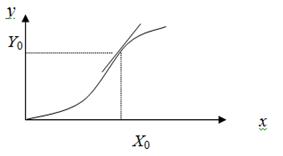
Рисунок 23
Исходную нелинейную зависимость  можно разложить в ряд Тейлора в окрестностях точки установившегося режима, и, отбросив члены ряда выше первого порядка, получить следующую приближенную зависимость:
можно разложить в ряд Тейлора в окрестностях точки установившегося режима, и, отбросив члены ряда выше первого порядка, получить следующую приближенную зависимость:
 ,
,
где  - значение производной функции
- значение производной функции  по x при подстановке в выражение этой производной x = x0.
по x при подстановке в выражение этой производной x = x0.
При расчете автоматических систем удобно линейные статические характеристики рассматривать в отклонениях переменных y и x от их значений y0 и x0.
Тогда это уравнение можно переписать в таком окончательном виде:




Произведенная линеаризация (методом касательных) имеет простую графическую интерпретацию: действительная нелинейная характеристика заменяется касательной к ней в точке, соответствующей установившемуся режиму. Коэффициент к равен тангенсу угла наклона этой касательной относительно оси абсцисс.
В более общем случае звено описывается нелинейным уравнением, включающим производные по времени от входных и выходных величин:

После разложения нелинейной функции в левой части уравнения в ряд Тейлора в точке установившегося режима, получим следующее линейное дифференциальное уравнение для приращений переменных:

Линеаризации применяется только для малых отклонений, то есть полученные в результате линеаризации уравнения пригодны для приближенного исследования только таких режимов в системах, при которых переменные величины на входе звеньев претерпевают достаточно малые отклонения от установившихся значений. Во-вторых, линеаризация применима только к непрерывно дифференцируемым нелинейностям.
3.2 Решение линейных дифференциальных уравнений.
При описании САУ в виде дифференциального уравнения, устанавливающего связь между входной и выходной величинами как в переходных, так и в установившихся режимах:

где  - входные величины элемента
- входные величины элемента
 - выходная величина элемента
- выходная величина элемента
 - коэффициенты уравнения, наз. параметрами
- коэффициенты уравнения, наз. параметрами
можно применить символическую (операторную) форму записи. Переход к этой форме осуществляют введением сокращенного условного обозначения операции дифференцирования:  . Соответственно к-тую производную обозначают
. Соответственно к-тую производную обозначают

Тогда исходное уравнение можно записать в виде:

или:
 .
.
Введем обозначения:
 - дифференциальный оператор при выходной величине, наз. собственным, или характеристическим оператором. Название обусловлено тем, что многочлен характеризует собственное движение элемента, т.е. движение при отсутствии внешних воздействий.
- дифференциальный оператор при выходной величине, наз. собственным, или характеристическим оператором. Название обусловлено тем, что многочлен характеризует собственное движение элемента, т.е. движение при отсутствии внешних воздействий.
| |||
 | |||


Тогда
 .
.
Другая применяемая форма записи дифференциальных уравнений основана на применении преобразования Лапласа. Применим преобразование Лапласа к дифференциальному уравнению, считая, что до приложения внешнего воздействия система находилась в покое и все начальные условия равны нулю. Получим:
 Сравнивая с уравнением в символической форме, замечаем их полную аналогию. Разница только в значении символа р: в одном случае это операция дифференцирования, в другом – комплексное число.
Сравнивая с уравнением в символической форме, замечаем их полную аналогию. Разница только в значении символа р: в одном случае это операция дифференцирования, в другом – комплексное число.
Непосредственно методы решения линейных дифференциальных уравнений и систем с постоянными коэффициентами подробно изложены в [3].
3.4 Преобразования Лапласа.
Операционное исчисление – совокупность методов прикладного математического анализа, позволяющих экономными и непосредственно ведущими к цели средствами получать решения линейных дифференциальных уравнений, а также разностных.
Сущность метода. Пусть задана некоторая функция  , действительной переменной
, действительной переменной  , причем такая, что для нее существует преобразование Лапласа (
, причем такая, что для нее существует преобразование Лапласа (  -преобразование):
-преобразование):

где - оригинал
 - изображение
- изображение
 - комплексная переменная.
- комплексная переменная.
Свойство линейности.

Свойство дифференцирования и интегрирования оригинала.

где 
Обратное преобразование Лапласа.


 .
.
Подробно вопросы преобразования Лапласа изложены в [4].
Рекомендованная литература по лекции: [3, 4].
Лекция 4 «Частотные характеристики САУ»
4.1 Простейшие сигналы.
4.2 Передаточные функции.
Частотные характеристики описывают передаточные свойства элементов и систем в режиме установившихся гармонических колебаний, вызванных внешним гармоническим воздействием. Зная частотную характеристику элемента, можно определить реакцию элемента на гармоническое воздействие любой частоты, а также на сумму гармонических воздействий различной частоты. Частотные характеристики широко используются в теории и практике автоматического управления, так как реальные возмущения, действующие на автоматические системы, могут быть представлены как сумма гармонических сигналов.
Пусть на вход линейного элемента в момент времени t=0 подано гармоническое воздействие определенной частоты w
 .
.
Через некоторое время, необходимое для протекания переходного процесса, элемент войдет в режим установившихся вынужденных колебаний, а выходная величина y(t) будет изменяться по гармоническому закону с той же частотой w , но с отличающейся амплитудой ym и со сдвигом  по оси времени
по оси времени
 ,
,
где  - фазовый сдвиг между входным и выходным сигналами;
- фазовый сдвиг между входным и выходным сигналами;
 - период колебаний.
- период колебаний.
Повторяя такой эксперимент при фиксированном  для различных значений частоты (от 0 до
для различных значений частоты (от 0 до  ), можно установить, что амплитуда
), можно установить, что амплитуда  и фазовый сдвиг
и фазовый сдвиг  выходного сигнала конкретного элемента зависят от частоты воздействия.
выходного сигнала конкретного элемента зависят от частоты воздействия.
Подавая гармоническое воздействие на вход различных элементов, можно убедиться, что величины и зависят также от типа и параметров элемента.
Так как амплитуда выходного сигнала зависит ещё от амплитуды входного сигнала, то целесообразно при описании передаточных свойств элементов рассматривать отношение амплитуд  .
.
4.1 Простейшие сигналы.
В теории САУ различают следующие разновдности простейших сигналов:
- гармонический (синусоидальный)  ;
;
- периодический  ;
;
- ступенчатый единичный сигнал  ;
;
- дельта-функция Дирака  ;
;
- степенная функция  .
.
Дата добавления: 2018-11-26; просмотров: 1518;
Поиск по сайту
Узнать еще
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- IX.3. Современные ландшафты мира
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А.2 Виды адсорбентов и их характеристики
- Активная мощность и угловые характеристики генератора

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
