Классификация по характеристикам управления
2.1. По принципу управления.
· а). САУ с разомкнутой цепью воздействий (рис. 16). Разомкнутые системы можно разделить в свою очередь на два класса: системы, осуществляющие управление в соответствии с изменением только задающего воздействия и системы, управляющие при изменении возмущения.
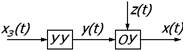
Рисунок 16
Алгоритм управления разомкнутой системы первого типа имеет вид:
 .
.
Чаще всего оператор Ау устанавливает пропорциональную связь между задающим воздействием хз(t) и управляющим воздействием y(t), а сама система в этом случае осуществляет программное управление.
Система управления по возмущению – это такая система, в которой для уменьшения отклонения управляемой величины от заданной измеряется возмущающее воздействие, обрабатывается по определенному алгоритму и накладывается на прежний управляющий сигнал (рис. 17).
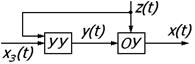
Рисунок 17
В системах управления по возмущению управляющее воздействие зависит от возмущающего и задающего воздействий:

причем в большинстве случаев оператор Ау может быть разделен на две не зависящие друг от друга составляющие:

Оператор Аз соответствует, как правило, простому пропорциональному преобразованию сигнала хз(t), а оператор Ав может быть и более сложным, например, устанавливающим нелинейное соотношение между сигналами ув(t) и z(t).
В большинстве случаев разомкнутые системы управления по возмущению выполняют функции стабилизации управляемой величины.
Преимущество разомкнутых систем управления по возмущению – их быстродействие: они компенсируют влияние возмущения еще до того, как оно появится на выходе объекта. Но применимы эти системы лишь в том случае, если на управляемую величину действует одно или два возмущения и есть возможность измерения этих возмущений.
· б). САУ с замкнутой цепью воздействий. Система управления по отклонению.
Управляющее воздействие в замкнутой системе формируется в большинстве случаев в зависимости от величины и знака отклонения истинного значения управляемой величины от ее заданного значения (рис. 18):
где  - сигнал ошибки (называемый также сигналом рассогласования).
- сигнал ошибки (называемый также сигналом рассогласования).
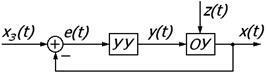
Рисунок 18
В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющих воздействий учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем.
Но вначале возмущение должно проявиться на выходе, система «почувствует» отклонение и лишь потом выработает управляющие воздействия, направленные на устранение отклонения. Несмотря на наличие определенных недостатков, этот принцип широко применяют при создании автоматических систем.
Во всех замкнутых системах существуют обратные связи, которые подразделяются на жесткие обратные связи и гибкие обратные связи. Жесткие обратные связи – это такие связи, в которых обратный сигнал существует как в динамическом, так и в статическом режиме. Гибкие обратные связи – связи, в которых сигнал обратной связи существует только в динамическом режиме.
· в). В комбинированных системах создают две цепи воздействий – по заданию и по возмущению, и управляющее воздействие формируется согласно оператору (рис. 19)

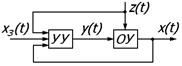
Рисунок 19
Эффективность работы комбинированной системы управления всегда больше, чем у порознь функционирующих замкнутой или разомкнутой систем.
2.2. По режимам функционирования.
В зависимости от характера изменения задающего воздействия во времени автоматические системы управления разделяются на следующие классы:
а) Стабилизирующая автоматическая система управления (система стабилизации) – это система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным (рис. 20):

б) Алгоритм функционирования программной автоматической системы содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени f(t):

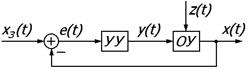
Рисунок 20
· в) Следящая автоматическая система управления предназначена для изменения управляемой величины в соответствии с изменениями другой величины, которая действует на входе системы и закон изменения которой заранее не известен:
 ,
,
Следящие системы используют обычно для дистанционного управления перемещением объектов в пространстве.
2.3. По свойствам системы в установившемся режиме.
· а) Статические системы - это такие системы, в которых управляемая величина в установившемся режиме зависит от величины возмущающего воздействия, в них при заданном воздействии, которое стремится к постоянному, отклонение управляемой величины также стремится к постоянной величине, отличной от нуля.
· б) Астатические системы - это такие системы, в которых управляемая величина в установившемся режиме не зависит от величины возмущающего воздействия, в них отклонение управляемой величины при любом постоянном задающем воздействии стремится к нулю.
3. Классификация САУ по другим признакам
3.1. По усилению мощности сигнала.
а) САУ прямого действия - это такая САУ, в которой используется энергия управляемого объекта.
б) САУ непрямого действия - это САУ, в которых управляющий сигнал создаётся дополнительным усилительным устройством.
3.2. По количеству контуров в системе.
а) одноконтурные САУ – системы, в которых существует только одна главная обратная связь.
б) многоконтурные САУ – системы, в которых помимо обратной главной связи существуют местные обратные связи.
3.3. По связности системы.
а) односвязные САУ - это САУ, в которых присутствует либо один регулятор, либо несколько регуляторов, взаимодействие которых учитывается в законе управления.
б) многосвязные САУ - это САУ, в которых присутствует несколько регуляторов независимых друг от друга.
3.4. По размерности системы.
а) одномерные САУ – системы, в которых существует один управляющий сигнал и одна управляемая величина.
б) многомерные САУ – системы, в которых количество управляемых величин и управляющих сигналов превышает единицу.
Рекомендованная литература по лекции: [1, 2].
Содержательный раздел 2 «Математическое описание САУ»
Лекция 3 «Временные динамические характеристики САУ»
3.1 Линеаризация дифференциальных уравнений.
3.2 Решение линейных дифференциальных уравнений.
3.3 Преобразования Лапласа.
Дата добавления: 2018-11-26; просмотров: 1180;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- II Классификация САSЕ-средств
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ
- Money Management - основы управления капиталом

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
