Классификация по характеру динамических процессов в системе
Краткий исторический очерк развития точной науки управления. Значение автоматизации производственных и транспортных процессов, как одного из основных направлений технического прогресса.
В настоящее время автоматика все больше проникает во все отрасли производства. Широкое внедрение автоматических устройств во все области техники стало возможным благодаря таким факторам, как высокий темп работы (устройство может выполнять элементарные действия со скоростью, которая не под силу человеку), широкий охват производства (с помощью автоматических устройств можно управлять одновременно множеством объектов), способность длительной работы (любое автоматическое устройство может работать бесконечно долго) и работа во вредных условиях производства.
Сложность автоматических систем значительно возросла. Если в период частичной автоматизации они обычно состояли из отдельных систем автоматического регулирования, взаимная координация действия которых осуществлялась человеком, то теперь возникла необходимость в автоматической координации их действий и, следовательно, в создании сложных взаимосвязанных систем автоматического регулирования.
Автоматизация производственных процессов значительно облегчает труд человека, способствует росту производительности труда, снижению себестоимости процессов и изделий и повышению их надежности.
Еще за 200 лет до нашей эры в древнем Вавилоне было автоматизировано открывание дверей храмов одновременно с зажиганием жертвенного огня. В трудах Герона Александрийского(50 лет до н. э.) упоминалось об автоматах для продажи священной воды и приборе для измерения длины пути, пройденного колесницей.
В средние века нашей эры во многих странах сооружались андроиды, т. е. автоматы, воспроизводящие действия человека, которым придавался и внешний облик человека.
В XVII веке уже существовали маятники часов и «уравнители хода» водяных мельниц. В XVIII веке И. П. Кулибиным для часов, хранящихся и сейчас в Эрмитаже, были сделаны танцующие куколки, которые выходили из корпуса часов каждый час. В XVIII ... XIX веках в связи с интенсивным развитием промышленности началась автоматизация отдельных процессов в различных видах производств.
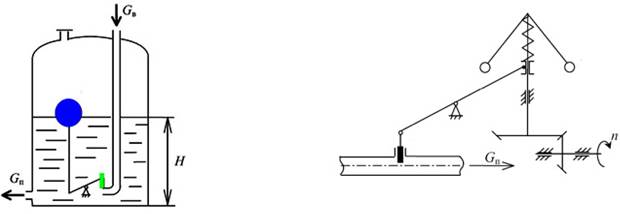
К первым промышленным автоматам, имевшим уже основные черты современных автоматических систем и построенным на принципах, явившихся основами теории автоматики, относятся: поплавковый регулятор уровня воды в котле «огнедействующей машины» И. П. Ползунова (1765 г.), регулятор скорости Д. Уатта(1784 г.) и система автоматического управления ткацким станком с закладкой программы на перфокарте Е. Жаккара (1806 г.).
Теория автоматики возникла значительно позднее начала ее практического применения. К числу первых наиболее серьезных работ в области теории относятся работы Д. Максвелла (1868 г.) и П. Л. Чебышева (1866 г.), но они, так же как и ряд других работ этого периода, имеют хотя и важное, но частное значение.
Основоположником современной теории автоматики является И. А. Вышнеградский (1876 г.), который доказал необходимость рассмотрения «регулятора» и объекта регулирования как единой динамической системы, обосновал применение общих методов к исследованию различных технических систем и создал ряд конкретных способов их исследования. Работы И. А. Вышнеградского легли в основу современных методов определения устойчивости и качества регулирования.
а б
Рисунок 1 – Регуляторы Ползунова (а) и Уатта (б)
В современной науке автоматики очень велико значение работ В. С. Кулебакина, Я. 3. Цыпкина, А. А. Воронова, Е. П. Попова, А. А. Андронова и других отечественных и иностранных ученых. К настоящему времени отработаны определенные исходные позиции для проектирования и исследования систем автоматического регулирования, общие приемы математической трактовки систем автоматического регулирования и отдельных ее элементов и приняты некоторые общие положения в отношении терминологии и условных изображений.
Перспективы развития автоматики огромны. Ее теория находится в зените своего развития. Намечается еще большее переплетение и проникновение автоматики в другие науки и, наоборот, обогащение последней за счет новых достижений смежных и родственных наук, прежде всего за счет новых элементов вычислительной техники и более глубокого освоения принципов адаптации. При этом автоматика, совершенствуясь, будет переходить в свою высшую ступень. Вместе с тем появятся новые виды энергии, другие средства измерения и управления, будет иной и их теория.
Различают несколько уровней автоматизации производства:
- локальная автоматизация, т.е. автоматизация отдельных технологических операций или единиц оборудования, построенная на базе узко специализированных по назначению автоматических регуляторов или широко универсальных систем, в которых, как правило, используют современные методы цифрового управления. Функциональная гибкость локальных систем управления технологическим оборудованием определяет их широкую универсальность и комплексность применения в различных сферах производства;
- автоматизация совокупности технологических процессов, когда автоматизированы связанные между собой технологические операции (процессы) или несколько единиц оборудования (автоматические линии, многоцелевые станки, транспортно-загрузочные роботы и др.). Они обеспечивают автоматическую работу комплексов технологического оборудования, координированное функционирование большого числа локальных систем. Необходимость в групповом управлении вызвана потребностями комплексной автоматизации многофункциональных участков технологического оборудования или сложных многосвязных технологических циклов промышленного производства;
- автоматизация управления производством, т.е. создание автоматизированных систем планирования и управления производством на базе вычислительной техники. Такие системы используют при управлении как технологическими объектами, так и коллективами людей, осуществляющими производственный процесс. На этом уровне большое значение придается организационному управлению, связанному преимущественно с решением задач экономического характера, разработкой планов и производственных программ на заданные сроки, управлением материальными потоками, запасами, поддержанием ритмичного хода производства, учетом и статистическим анализом состояния производства;
- автоматизация инженерно-технической деятельности, когда автоматизируются проектирование, конструирование новых изделий, технологическая подготовка производства; важными средствами такой автоматизации стали САПР.
Для любых автоматических систем, в которых протекают процессы управления (технические системы или живые организмы), характерна одна общая черта: отдельные элементы этих систем взаимосвязаны так, что передают друг другу некоторые сообщения о происходящих в них процессах посредством сигналов, т.е. информации. По этому признаку можно проследить глубокое сходство и единство процессов управления.
Информация всегда связана с материальным носителем какой-либо физической величины. В технических системах материальные носители информации называют носителями сигналов (например, электрическое напряжение и ток, давление, механическое перемещение и др.), которые можно изменять в соответствии с передаваемой информацией. Конструктивные элементы автоматической системы должны преобразовывать одни физические величины (и соответствующие им сигналы) в другие.
Звено - простейший элемент, входящий в автоматическую систему, в котором определенным образом преобразуется входной параметр в выходной. Схематическое изображение звена в виде блока не отражает особенностей его конструкции. Интерес представляет только связь между воздействием на вход звена и его реакцией на выходе. Такой подход позволяет создавать модели элементов автоматических систем самых различных природных систем, техники и имитировать их поведение, что значительно облегчает поиск эффективных методов управления.
Причем звенья представляются в виде передаточных функций, а их взаимодействие друг с другом - в виде линий со стрелками, показывающих направление действия звеньев.
Связь - это условное изображение направления взаимного влияния звеньев друг на друга или передачи информации внутри автоматической системы. Подчеркнем, что связь определяет направление влияния и не обязательно связь изображает непосредственное соединение звеньев автоматической системы.
Для изображения отдельных элементов и связей в теории автоматического регулирования приняты специальные условные обозначения, которые приведены в таблице 1.
Таблица 1 - Условные обозначения, принятые в теории автоматического регулирования
| Наименование | Обозначение |
| Звено (элемент, устройство, механизм) | 
|
| Сумматор (a + b = c) | |
| Сумматор (a - b = c) | |
| Функциональная связь | |
| Ответвление |
При исследовании автоматических систем широкое распространение получило их представление в виде структурных схем. Структурной схемой автоматической системы называется ее представление в виде условных изображений, каждое из которых соответствует каждому звену автоматической системы.
Для того чтобы реальную автоматическую систему представить в виде структурной схемы, нужно сначала установить, каким звеньям эквивалентны с большей или меньшей степенью точности конструктивные элементы автоматической системы или их группы, а затем соединить звенья между собой в соответствии с конструкцией автоматической системы.
Таким образом, структурная схема является изображением автоматической системы в виде совокупности динамических звеньев с указанием связей между ними. Структурная схема может быть составлена на основе известных уравнений автоматической системы, и, наоборот, уравнения автоматической системы могут быть получены из структурной схемы.
Необходимо отметить, что в некоторых случаях составление структурной схемы сопряжено с большими трудностями и может быть сделано только на основании детального анализа исходных дифференциальных уравнений автоматической системы. В этом случае структурная схема не облегчает нахождения основных уравнений автоматической системы, но и в этом случае она остается весьма ценной, так как на ней в наглядной форме представлены все элементы исследуемой автоматической системы и все существующие между ними связи. Это может оказаться полезными во всех дальнейших исследованиях.
Научно-техническая революция, вызванная созданием цифровых управляющих вычислительных машин, сказалась на развитии многих отраслей науки и техники. Особенно сильному влиянию подверглись теория и практика автоматического регулирования. Применение управляющих ЭВМ открывает большие возможности при управлении сложными техническими устройствами и системами.
Методы исследования, разработанные в теории автоматического регулирования, являются довольно общими, область применения их выходит за рамки практического приложения дисциплины. Принципы автоматического управления (регулирования), на основе которых строятся технические системы, имеют универсальный характер. Аналогичные принципы, например принцип обратной связи, заложены в регуляционные системы живых организмов, системы управления производством, обществом и т.д. Поэтому изучение теории автоматического peгyлирования в настоящее время становится необходимым не только для специалистов в области автоматики.
1.2 Современные требования к прикладной теории управления.
Любой технологический процесс можно расчленить на ряд более простых, неравнозначных составных, но связанных между собой процессов. В связи с этим говорят, что в технологическом процессе выделяют рабочие операции, т.е. действия, непосредственным результатом которых является требуемая обработка материала, энергии, информации, и операции управления, обеспечивающие придание в нужные моменты нужных режимов, направлений и т.п.
Рабочие операции сопряжены с затратами энергии, и, если они выполняются человеком, то на их выполнение затрачивается его физическая сила. На операции управления затрачивается интеллектуальный труд человека, и эти операции требуют определенной квалификации исполнителя.
Замена труда человека в рабочих операциях работой машин и механизмов называется механизацией.
Под автоматическим управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели. Совокупность операций управления образует процесс управления.
Процесс управления, осуществляемый без участия человека, называется автоматическим. Замена труда человека в операциях управления действиями технических управляющих устройств называется автоматизацией. Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством.
Автоматическое без участия человека-оператора обеспечение поддержания требуемых значений параметров объекта регулирования, определяющих протекание процесса независимо от изменения внешних условий, называется автоматическим регулированием. Автоматическое регулирование является частным случаем автоматического управления.
Теория автоматического регулирования, как и любая другая наука, имеет свои понятия, термины и определения, которые являются отражением накопленных в ней знаний. Вот поэтому такое важное значение имеет создание единой, стройной терминологии и общей классификации автоматических систем.
Системой автоматического регулирования называется динамическая система, стремящаяся сохранять в допустимых пределах отклонения между требуемыми и действительными значениями регулируемых переменных (величин) при помощи их сравнения для управления источниками энергии без непосредственного участия человека.
Любая автоматическая система состоит, по крайней мере, из объекта регулирования (ОР) и автоматического регулятора (АР), реагирующего на изменение регулируемой величины y(t) и воздействующего на объект внешнего возмущения f(t).
Для наглядного схематического изображения системы автоматического регулирования используют структурные (функциональные) схемы, в которых отдельные элементы системы изображаются в виде прямоугольников, а связи между звеньями - линиями со стрелками, показывающими направление передачи сигналов.
Объект регулирования - это совокупность технических средств (машин, аппаратов или устройств), которая нуждается в оказании специально организованных воздействий извне для достижения поставленной цели регулирования.
Для осуществления поставленной цели объект регулирования должен иметь орган управления, изменяя состояние которого можно воздействовать на количество подводимой энергии. Например, для дизеля - система подачи топлива, для тягового генератора - ток обмотки возбуждения.
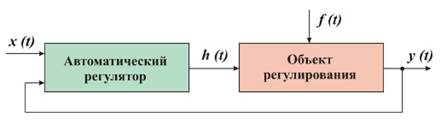
Рисунок 2 – Функциональная схема автоматической системы
Регулируемая величина - основной параметр объекта регулирования, характеризующий его работу, который требуется в течение достаточно длительного промежутка времени поддерживать постоянным или изменять по заранее заданному закону.
Обычно регулируемая величина в той или иной степени характеризует количественные и качественные показатели протекания процессов в объекте регулирования. Важность регулируемой величины подчеркивается и тем, что она всегда входит в название системы автоматического регулирования. Например, система автоматического регулирования частоты вращения коленчатого вала дизеля (регулируемая величина - частота вращения коленчатого вала дизеля), система автоматического регулирования напряжения тягового генератора (регулируемая величина - напряжение тягового генератора) и т.д.
Автоматическим регулятором называется устройство, осуществляющее воздействие на объект регулирования в соответствии с заложенным в нем законом (алгоритмом) регулирования.
Конструктивно автоматические регуляторы могут быть выполнены на различной элементной базе (механические, пневматические, гидравлические, гидро-механические, электромашинные, магнитные, электронные и т.д.). Выбор исполнения автоматического регулятора определяется уровнем развития научно-технического прогресса в данной отрасли производства и в стране в целом, а также устоявшимися традициями. В последнее время все большее внимание уделяется разработке автоматических регуляторов на микропроцессорной элементной базе, которая представляет возможность гибкого и оперативного изменения параметров и алгоритмов автоматического регулирования.
Возмущающее воздействие - это внешнее воздействие (сила), стремящееся нарушить требуемую функциональную связь между требуемыми и действительными значениями регулируемых переменных путем вывода объекта регулирования из состояния покоя или равномерного движения.
Другими словами можно сказать, что любой автоматический регулятор предназначен для ликвидации (компенсации) вредного воздействия возмущений на объект регулирования. В качестве внешних возмущений на поезд можно отметить влияние параметров окружающей среды (температура, давление, ветер и т.п.), изменение профиля пути, набор и расстановка вагонов в составе и т.д.
Поведение всякой автоматической системы определяется: целью регулирования, окружающей обстановкой или внешними условиями и свойствами управляемой и управляющей систем.
Управляющая переменная - представляет собой воздействие на объект регулирования, создаваемое управляющей системой.
Главная обратная связь - это часть выходного сигнала, подаваемого на вход системы.
Местная обратная связь - это часть выходного сигнала промежуточного звена, подаваемого на вход одного из предыдущих звеньев.
Сигнал ошибки (рассогласование) - разность между входным сигналом и сигналом обратной связи.
Рекомендованная литература по лекции: [1].
Лекция 2 «Системы автоматического управления»
2.1 Задачи, решаемые САУ.
2.2 Требования, предъявляемые к САУ.
2.3 Фундаментальные принципы управления.
2.4 Основные виды САУ.
2.1 Задачи, решаемые САУ.
Теория автоматического управления применяется не только к технологическим объектам, но и к задачам управления предприятиями, процессам принятия решений, системам массового обслуживания и другим сложным системам. За последние десятилетия радиотехнические системы и средства автоматизации претерпели существенные изменения, возникли новые задачи для их решения автоматическими устройствами. Эти задачи связаны с работой систем при случайных изменениях состояния, возрастанием роли радиоэлектронной борьбы, развитием систем пространственно-временной обработки и распределенных вычислений, необходимостью оперативного принятия решений в условиях неопределенности, широким использованием микропроцессорных средств, телекоммуникационного взаимодействия и другими усовершенствованиями. В связи с переходом к рыночным отношениям неизмеримо возросли требования к эффективности и конкурентоспособности систем, а следовательно, к робастности и отказоустойчивости систем автоматического управления (САУ), проблемам их проектирования.
Следует отметить, что современные САУ тесно связаны с такими направлениями развития систем телекоммуникации и связи, как цифровая обработка сигналов, теория фильтрации, беспроводные системы связи и др. САУ широко используются при создании роботов, самонаводящихся систем, оптико-локационных станций и т.д. Возрастает сложность задач, решаемых управляющими устройствами. Так, на современных самолетах устанавливаются радиолокационные станции (РЛС), оборудованные антеннами с активной фазированной решеткой, автоматическая система антенного комплекса обеспечивает практически одновременное функционирование РЛС в разных режимах и разных частотных диапазонах – в одном режиме как обычный локатор, в другом – постановщик помех для «глушения» РЛС других летательных аппаратов. Широкое распространение получили различные информационные технологии для проектирования и использования в САУ (CASE-средства, SCADA-системы, беспроводные технологии и др.).
2.2 Требования, предъявляемые к САУ.
Применимость системы автоматического регулирования в каждом конкретном случае зависит от того, насколько она удовлетворяет предъявляемым к ней требованиям. Основным требованием является сохранение заданной функциональной зависимости между управляющими и регулируемыми переменными на входе и выходе системы. Идеальных систем, которые бы выполняли это требование абсолютно точно, не существует. Поэтому речь может идти о приближении работы системы к идеальной. Чем больше степень этого приближения, тем сложнее получается система. В связи с этим задача проектирования автоматической системы заключается в том, чтобы найти разумный компромисс между стремлением получить высокое качество ее работы и достигнуть это простыми техническими средствами. Требования, предъявляемые к поведению автоматической системы в динамике, зависят от ее назначения, характера работы, конкретных условий работы и т.д. Различают следующие категории требований:
- к запасу устойчивости системы. Любая автоматическая система из-за наличия обратных связей склонна к колебаниям. В устойчиво работающей системе происходят затухающие с течением времени колебания и автоматическая система приходит в установившееся состояние. Устойчивость автоматической системы не должна нарушаться во время ее работы при изменении в определенных пределах внешних и внутренних условий, например температуры окружающей среды, напряжения питающей сети, сопротивления и т.п. Требование устойчивости должно удовлетворяться с некоторым запасом, предусматривающим возможные изменения параметров автоматической системы во время ее работы. Требование устойчивости является необходимым, но не достаточным условием для характеристики свойств системы автоматического регулирования в реальных условиях работы при наличии различного рода внешних воздействий;
- к величине ошибки в установившемся состоянии. Статические свойства системы автоматического регулирования оценивают по статической характеристике, которая отражает зависимость установившегося значения управляемой величины от возмущения. Относительная статическая ошибка или статизм автоматической системы определяет относительное отклонение регулируемой величины от заданного значения. Эффективность автоматической системы в установившемся режиме оценивают так называемой степенью точности - отношением абсолютной статической ошибки неавтоматизированного объекта регулирования (без регулятора) к абсолютной статической ошибке автоматической системы. На практике величина точности регулирования принимается в пределах 1 ... 3%;
- к поведению системы в переходном процессе. В устойчивой автоматической системе переходный процесс затухает. Однако для практики вовсе не безразличен характер затухания переходного процесса. Так, например, если переходный процесс затухает медленно (рис. 3), и автоматическая система долго входит в новый установившийся режим, то она обладает недостаточным быстродействием, и, следовательно, ее применение будет ограничено.
Поэтому качество процессов регулирования может оцениваться качеством переходных процессов и ошибками регулирования. Качество переходных процессов оценивается переходной функцией, которая представляет собой реакцию автоматической системы на внешнее воздействие. В качестве показателей качества регулирования принимают:
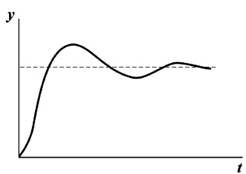
Рисунок 3
а) время регулирования определяет длительность переходного процесса. Теоретически переходный процесс длится бесконечно долго, однако практически считают, что он заканчивается, как только отклонение регулируемой величины от нового ее установившегося значения не будет превышать допустимых пределов (рис. 4).
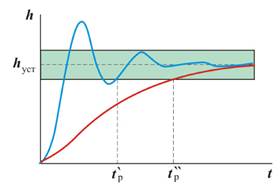
Рисунок 4
Обычно установившееся значение принимается, когда регулируемая величина приближается к заданному значению с погрешностью не более 3...5% от нового установившегося значения;
б) перерегулирование представляет собой максимальное отклонение регулируемой величины от нового установившегося значения (рис. 5). Обычно первый максимум регулируемой величины является наибольшим. Время регулирования и перерегулирование тесно связаны между собой. На первый взгляд может показаться, что перерегулирование недопустимо, так как оно увеличивает время регулирования.
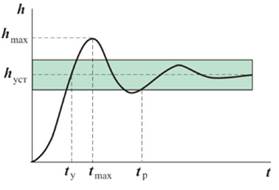
Рисунок 5
Однако это не так. Действительно, перерегулирование Δh = hmax - hуст появляется вследствие того, что автоматическая система к новому установившемуся состоянию приходит с определенной скоростью. Чем больше эта скорость, тем дальше за новое установившееся положение пройдет автоматическая система по инерции. Значит, для уменьшения перерегулирования необходимо уменьшить скорость, с которой автоматическая система подходит к новому установившемуся состоянию. Это в конечном итоге приведет к возрастанию времени регулирования. Так как время регулирования характеризует быстродействие автоматической системы, то стремятся, там где это необходимо, свести его к минимуму. Это значит, что автоматическая система должна отрабатывать задающее воздействие с большой скоростью, что в итоге приводит к большому перерегулированию. Кроме того, поскольку переходный процесс колебательный, то будут иметь место большие ускорения регулируемой величины, что может вызвать недопустимо большие динамические нагрузки на элементы автоматической системы. Таким образом, как отсутствие, так и слишком большое перерегулирование нежелательно. Поэтому в качестве оптимального допускают перерегулирование в пределах 20...30%.
Наиболее целесообразно использовать во время переходного процесса переменную скорость изменения регулируемой величины. В начале переходного процесса скорость изменения регулируемой величины должна быть максимальной, а при приближении к заданному значению скорость изменения регулируемой величины уменьшается. В идеальном случае при достижении заданного значения она должна быть равна нулю. Однако практически реализовать такой алгоритм управления представляет значительные трудности из-за наличия инерционности различного вида и конечности источника энергии.
2.3 Фундаментальные принципы управления.
Принцип действия всякой системы автоматического регулирования заключается в том, чтобы обнаружить отклонения регулируемых величин, характеризующих работу объекта регулирования или протекание процесса от требуемого режима и при этом воздействовать на объект регулирования или процесс так, чтобы устранить эти отклонения.
В процессе управления всегда есть физические величины, которые требуется изменять строго определенным образом.
Системы автоматического регулирования должны на основании измерения регулируемых величин, формировать управляющие воздействия на объект регулирования. Изменение поведения объекта регулирования может осуществляться по принципам разомкнутого или замкнутого циклов.
В разомкнутой автоматической системе управляющее воздействие формируется на основе значения заданной величины. В таких системах отсутствует связь между входом и выходом. Вследствие этого протекание процесса управления в разомкнутых системах не зависит от результатов, т.е. от того, как система выполняет свои функции. В разомкнутой автоматической системе имеет место только прямое воздействие: от оператора к объекту регулирования, от входа к выходу. Простейший пример - процесс включения электрического освещения в помещении.
Для тoгo чтобы регулируемая величина y(t) объекта регулирования (рис. 6) приняла требуемое значение, на eгo вход подается входное воздействие х(t). Однако на практике регулируемая величина y(t) объекта регулирования по ряду причин отклоняется от требуемого значения. Одной из этих причин является влияние различного рода внешних возмущающих воздействий f(t) на объект регулирования. Дрyгой причиной является влияние изменения параметров объекта регулирования или других элементов системы, т.е. влияние параметрических возмущающих воздействий (коэффициентов усиления, постоянных времени и т.д.). Третья причина, вызывающая отклонение регулируемой величины, обусловлена изменением требуемого значения регулируемой величины (изменением требуемой температуры закалочной печи, произвольным изменением угловых координат цели). Если требуемое значение регулируемой величины изменяется, то для соответствующего изменения действительного ее значения необходимо изменять управляющее воздействие h(t) на входе объекта регулирования. При изменении же управляющего воздействия на входе объекта регулирования, обладающего инерционностью, возникает переходный процесс, в течение котopoгo регулирумая величина не будет соответствовать требуемому значению.
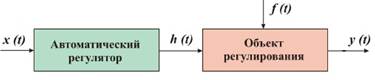
Рисунок 6
Отклонение регулируемой величины от требуемого значения может возникать не только в переходном, но и в установившемся динамическом режиме, когда требуемое значение изменяется, например, с постоянной скоростью или постоянным ускорением. Oтклонение регулируемой величины под влиянием перечисленных причин может достигать недопустимо больших значений, при которых нарушается обеспечиваемый объектом технический процесс. Поэтому возникает задача уменьшения отклонений выходных величин объектов от требуемых значений. Эта задача является основной задачей управления (регулирования).
Под автоматическим управлением понимается осуществление воздействий, получаемых в результате обработки имеющейся информации и направленных на уменьшение отклонения функционирования объекта регулирования от заданного алгоритмом функционирования.
Очевидно, что необходимость в управляющем воздействии возникает в тех случаях, когда пpoцecc в объекте регулирования отклоняется от предписаний, заданных алгоритмом функционирования.
Алгоритм регулирования в таких автоматических системах определяется свойствами отдельных звеньев или характером сигналов, подаваемых на вход. По принципу разомкнутого регулирования работают многие автоматические системы, имеющие заранее определенный алгоритм действий. Например, запуск двигателя внутреннего сгорания, включение компрессора на локомотиве, подача песка под колесные пары, процесс зарядки аккумуляторной батареи и т.п. Для нормального функционирования таких автоматических систем необходимо соблюдение ряда мер.
В этой системе управляющее воздействие может вырабатываться человеком. Сравнивая действительное и требуемое значения регулируемой величины, человек может выявлять отклонение между ними и в соответствии с величиной и знаком этого отклонения определяется величина управляющего воздействия.
Во-первых, полное соответствие между заданным и фактическим значениями регулируемой величины может иметь место только в случае, когда характеристики отдельных звеньев автоматической системы будут стабильными и будет исключено воздействие внешних возмущений.
Во-вторых, они должны быть тщательно настроены, т.е. каждому положению задающего устройства должно строго соответствовать значение регулируемой величины. Однако сохранение настроек при износе деталей или старении элементов, а также при изменении температуры окружающей среды представляет трудную задачу. Поэтому разомкнутые системы не могут обеспечить высокую точность регулирования. В них не измеряется результат, вызываемый управляющим воздействием, и не осуществляются действия, влияющие на этот результат с тем, чтобы он соответствовал желаемому.
В замкнутых автоматических системах регулируемая величина сравнивается с заданным ее значением и на базе сигнала ошибки формируется управляющее воздействие. Протекание процесса автоматического регулирования зависит от результатов этого сравнения.
Для реализации такого алгоритма регулирования в конструкцию автоматической системы вводится связь, получившая название обратной связи, потому что по ней происходит передача сигнала с выхода объекта регулирования на вход автоматической системы по направлению, обратному направлению передачи управляющего воздействия на объект регулирования.
Проще всего - посадить человека-оператора, который будет выполнять роль обратной связи, например, в процессе ручного управления транспортным средством будь то автомобиль, трактор, локомотив, самолет или космический корабль. В этом случае сравнивая показания контрольных приборов, измеряющих действительное значение регулируемой величины (скорость, мощность, сила тяги, высота полета и т.п.), с заданным ее значением, человек-оператор производит дополнительное воздействие на объект регулирования с целью достижения минимального отклонения регулируемой величины от заданного значения.
С одной стороны, действия человека-оператора элементарно просты, а с другой - наблюдение за множеством приборов довольно утомительно, и легко могут быть выполнены специальным автоматическим устройством, производящим сравнение заданного и фактического значения регулируемой величины и на его основе формирующем управляющее воздействие на объект регулирования. Так появились первые автоматические регуляторы призванные заменить монотонный и малопроизводительный труд человека на автоматическое устройство. Такое устройство представляет собой автоматический регулятор.
Объект регулирования и автоматический регулятор образуют замкнутую систему (рис. 7).
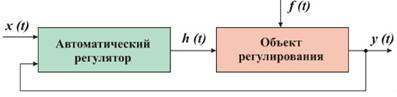
Рисунок 7
В замкнутых автоматических системах действия человека-оператора сводятся к первоначальной установке заданного режима и общему наблюдению за протеканием процессов в автоматической системе. Точность регулирования в замкнутых автоматических системах, т.е. точность поддержания требуемой функциональной зависимости между входом и выходом, в основном зависит от точности, с которой производится сравнение требуемого и фактического значения регулируемой величины.
Замкнутые системы автоматического регулирования различаются по принципу регулирования:
- по отклонению;
- по возмущению;
- комбинированные.
Системы автоматического регулирования, работающие по принципу отклонения, являются основными в практике автоматизации различных производственных объектов. Они характеризуются наличием обратной связи, осуществляющей подачу части выходного сигнала на вход автоматической системы и образующей замкнутый контур регулирования. Сущность этого принципа регулирования состоит в том, что фактическое значение регулируемой величины постоянно сравнивается с ее заданным значением. При наличии разности этих значений выше заранее установленного порога в системе вырабатывается регулирующее воздействие, направленное на устранение этой разности или на уменьшение ее до некоторого допустимого значения.
Требуемое значение регулируемой величины автоматической системы y(t) (рис. 8) определяется задающим воздействием x(t), поступающим от задающего устройства. Отклонение регулируемой величины y(t)
Дата добавления: 2018-11-26; просмотров: 1302;
Поиск по сайту
Узнать еще
- II Классификация САSЕ-средств
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Единство и взаимосвязь процессов воспитания и обучения.
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ
- V. По характеру изменений в первичной структуре ДНК.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
