Определение различных конфигураций манипулятора
Для манипуляторов типа Пума и других манипуляторов с вращательными сочленениями возможны различные типы конфигурации, которые определяются по аналогии с геометрией руки человека. Типы конфигурации манипулятора устанавливаются следующим образом (рис. 4.2):
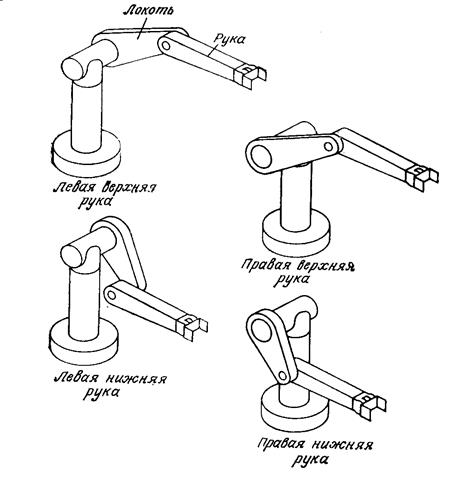
Рисунок 7.1. Определение различных конфигураций манипулятора
ПРАВАЯ РУКА: При неподвижном 3-м сочленении увеличение угла  приводит к увеличению координаты запястья по оси z0.
приводит к увеличению координаты запястья по оси z0.
ЛЕВАЯ РУКА: При неподвижном 3-м сочленении увеличение угла приводит к уменьшению координаты запястья по оси z0.
ВЕРХНЯЯ (локоть выше запястья) РУКА: Положение запястья {ПРАВОЙ/ЛЕВОЙ} руки по отношению к системе координат плеча характеризуется {отрицательным/положительным} значением координаты по оси y2.
НИЖНЯЯ (локоть ниже запястья) РУКА: Положение запястья {ПРАВОЙ/ЛЕВОЙ} руки по отношению к системе координат плеча характеризуется {положительным/отрицательным} значением координаты по оси y2.
КИСТЬ ВНИЗ: Скалярное произведение единичного вектора sсистемы координат схвата и единичного вектора y5 системы координат (х5, у5, z5) положительно.
КИСТЬ ВЕРХ: Скалярное произведение единичного вектора sсистемы координат схвата и единичного вектора y5 системы координат (х5, у5, z5) отрицательно.
Каждый из трех индикаторов конфигурации звеньев может быть определен следующим образом:
РУКА=  (7-2)
(7-2)
ЛОКОТЬ=  (7-3)
(7-3)
ЗАПЯСТЬЕ=  (7-4)
(7-4)
В дополнение к этим индикаторам существует ПЕРЕКЛЮЧАТЕЛЬ:
ПЕРЕКЛЮЧАТЕЛЬ= 
(7-5)
Значения индикаторов и переключателя задаются исследователем до начала решения обратной задачи кинематики.
Дата добавления: 2021-11-16; просмотров: 634;
Поиск по сайту
Узнать еще
- Cбор государственных налогов с различных слоев населения
- I. Определение и структура методов обучения.
- I. Определение условий выполнения рукописи.
- I. Определение, виды радиоактивности, радиоактивные семейства
- Mатематическое определение ОС.
- А) Деградация почв и определение ее скорости
- А) доступность до центра осознания различных логическнх уровней
- Аграрное право регулирует земельные, трудовые, имущественные, организационные, управленческие и другие отношения различных аграрных субъектов.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
