Решение для второго сочленения
Чтобы найти  , спроектируем вектор p на плоскость x1, y1, как показано на рис. 7.2.
, спроектируем вектор p на плоскость x1, y1, как показано на рис. 7.2.
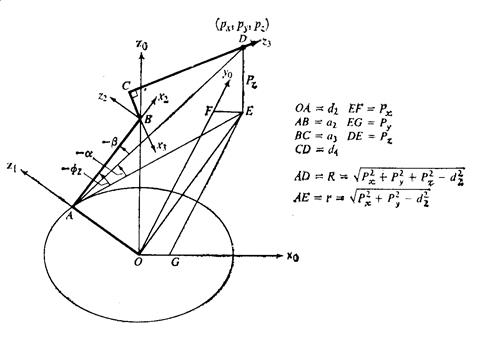
Рисунок 7.2. Решение для 2-го сочленения
В соответствии с этим рисунком возможны четыре различных конфигурации манипулятора. Каждой конфигурации соответствует свое значение угла  при
при  и
и  (табл. 7.1):
(табл. 7.1):
Таблица 7.1. Угол при различных конфигурациях манипулятора
| Конфигурация манипулятора |  |
РУКА | ЛОКОТЬ | РУКА· ЛОКОТЬ |
| ЛЕВАЯ ВЕРХНЯЯ рука |  |
-1 | +1 | -1 |
| ЛЕВАЯ НИЖНЯЯ рука |  |
-1 | -1 | +1 |
| ПРАВАЯ ВЕРХНЯЯ рука | |
+1 | +1 | +1 |
| ПРАВАЯ НИЖНЯЯ рука | |
+1 | -1 | -1 |
Как следует из табл. 7.1, используя индикаторы конфигурации РУКА и ЛОКОТЬ, для можно записать единое для всех возможных конфигураций манипулятора выражение:
 , (7-18)
, (7-18)
где составной индикатор конфигурации  определяет соответствующий знак угла
определяет соответствующий знак угла  , а точкой обозначена операция умножения индикаторов. Геометрия манипулятора, отраженная в схеме 7.2, позволяет записать следующие соотношения::
, а точкой обозначена операция умножения индикаторов. Геометрия манипулятора, отраженная в схеме 7.2, позволяет записать следующие соотношения::
 ,
,  , (7-19)
, (7-19)
 , (7-20)
, (7-20)
 , (7-21)
, (7-21)
 ,
,
(7-22)
 . (7-23)
. (7-23)
Из равенств (7-18) – (7-23) можно определить значение функций синуса и косинуса угла :
 , (7-24)
, (7-24)
 . (7-25)
. (7-25)
Равенства (7-24) и (7-25) позволяют найти значение :
 . (7-26)
. (7-26)
Дата добавления: 2021-11-16; просмотров: 463;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Здания для проживания людей
- III. Тесты для самоконтроля студентов
- III. ТРЕБОВАНИЯ РКФ ДЛЯ ДОПУСКА СОБАК В ПЛЕМЕННОЕ РАЗВЕДЕНИЕ
- IV. Сложнолегированные сплавы для горячего изостатического прессования (ГИП).

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
