СУЩЕСТВЕННАЯ И НЕСУЩЕСТВЕННАЯ АПРИОРНАЯ НЕОПРЕДЕЛЕННОСТЬ
Прежде чем перейти к обсуждению понятия оптимальности и конкретному рассмотрению методов решения задач синтеза в условиях априорной неопределенности и ограниченного статистического описания, основные типы которого были рассмотрены в гл. 3, полезно обсудить вопрос о том, какая же степень априорной неопределенности является существенной и действительно затрудняет решение задачи синтеза оптимальной системы по классическим байесовым приемам. Для того чтобы убедиться в том, что неполнота статистического описания данных задачи не всегда ведет к невозможности нахождения оптимального правила принятия решения, рассмотрим сначала пример с довольно большой априорной неопределенностью.
Пусть требуется решить задачу различения сигналов (распознавания образов) по результатам наблюдения дискретной последовательности случайных величин  , каждая компонента которой
, каждая компонента которой  является аддитивной смесью помехи
является аддитивной смесью помехи  и соответствующей компоненты одного из т возможных дискретных сигналов
и соответствующей компоненты одного из т возможных дискретных сигналов  . Истинная ситуация заключается в том, что в реально наблюдаемой последовательности
. Истинная ситуация заключается в том, что в реально наблюдаемой последовательности  может присутствовать любой из возможных сигналов
может присутствовать любой из возможных сигналов  , поэтому параметр
, поэтому параметр  , характеризующий ситуацию, просто нумерует подлежащие различению сигналы и принимает значения
, характеризующий ситуацию, просто нумерует подлежащие различению сигналы и принимает значения  (
(  ). Решение
). Решение  заключается в том, чтобы по значениям наблюдаемой последовательности вынести суждение, какой именно из сигналов присутствует в этой последовательности, то есть сводится к выбору одной из т альтернатив,
заключается в том, чтобы по значениям наблюдаемой последовательности вынести суждение, какой именно из сигналов присутствует в этой последовательности, то есть сводится к выбору одной из т альтернатив,  (
(  ). Будем считать, что априорные вероятности появления различных одинаковы, то есть
). Будем считать, что априорные вероятности появления различных одинаковы, то есть  , а последствия от любого неправильного решения также одинаковы (без ограничения общности потери от неправильного решения можно принять равными единице), правильное же решение дает нулевые потери. Последнее означает, что матрица потерь
, а последствия от любого неправильного решения также одинаковы (без ограничения общности потери от неправильного решения можно принять равными единице), правильное же решение дает нулевые потери. Последнее означает, что матрица потерь  имеет элементы
имеет элементы
 , (4.2.1)
, (4.2.1)
где  - символ Кронекера.
- символ Кронекера.
Помеху будем считать гауссовой, некоррелированной, с нулевым математическим ожиданием. Априорная неопределенность будет связана с часто имеющимся на практике незнанием интенсивности помехи, в результате чего дисперсия  неизвестна и является как раз одним из таких дополнительных неизвестных параметров функции правдоподобия
неизвестна и является как раз одним из таких дополнительных неизвестных параметров функции правдоподобия  , о которых шла речь в § 3.2. (В данном примере этот параметр одинаков для всех значений .)
, о которых шла речь в § 3.2. (В данном примере этот параметр одинаков для всех значений .)
Параметрически неопределенное описание функции правдоподобия  будет иметь вид
будет иметь вид
 . (4.2.2)
. (4.2.2)
Из-за наличия неизвестного параметра  распределение вероятности данных наблюдения
распределение вероятности данных наблюдения  нам фактически неизвестно при любом значении , что, казалось бы, исключает возможность использования байесова подхода. Однако все-таки воспользуемся им, не обращая некоторое время внимания на то, что величина неизвестна. В соответствии с общими правилами гл. 2 (2.4.6) и введенными предположениями о
нам фактически неизвестно при любом значении , что, казалось бы, исключает возможность использования байесова подхода. Однако все-таки воспользуемся им, не обращая некоторое время внимания на то, что величина неизвестна. В соответствии с общими правилами гл. 2 (2.4.6) и введенными предположениями о  и
и  апостериорный риск равен
апостериорный риск равен
 . (4.2.3)
. (4.2.3)
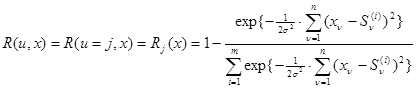
Это выражение зависит от интенсивности помехи и в связи с ее неопределенностью также является неопределенным. Тем не менее оптимальное правило решения может быть найдено точно, поскольку  независимо от значения достигается для того значения j, для которого величина
независимо от значения достигается для того значения j, для которого величина
 (4.2.4)
(4.2.4)
минимальна или величина
 (4.2.5)
(4.2.5)
максимальна.
Таким образом, оптимальное байесово правило решения имеет вид  , если
, если
 (4.2.6)
(4.2.6)
для всех  , ,
, ,
 (4.2.7)
(4.2.7)
и не зависит от неизвестного параметра , а следовательно, априорная неопределенность, связанная в данной задаче с незнанием интенсивности помехи, является .несущественной.
Перейдем теперь к общему случаю. Пусть имеющаяся априорная неопределенность не позволяет задать плотности распределения вероятности и  и вместо них введены классы распределений вероятности Pl (
и вместо них введены классы распределений вероятности Pl (  Pl )и P0(
Pl )и P0(  P0 ), такие, что любые из возможных при данной априорной неопределенности и принадлежат к этим .классам. В соответствии с материалами гл. 3 классы Pl и P0могут быть произвольно широки, вплоть до множества всех неотрицательных нормируемых на единицу функций, как это происходит при полной априорной неопределенности. Найдем апостериорный риск для какой-либо пары распределений х и , таких, что Pl , P0 ,
P0 ), такие, что любые из возможных при данной априорной неопределенности и принадлежат к этим .классам. В соответствии с материалами гл. 3 классы Pl и P0могут быть произвольно широки, вплоть до множества всех неотрицательных нормируемых на единицу функций, как это происходит при полной априорной неопределенности. Найдем апостериорный риск для какой-либо пары распределений х и , таких, что Pl , P0 ,
 . (4.2.8)
. (4.2.8)
и попытаемся отыскать его минимум по решению .
Если этот минимум достигается для значения  , которое одинаково для Pl и P0 , то очевидно, что априорная неопределенность статистического описания х и является несущественной. Само правило решения
, которое одинаково для Pl и P0 , то очевидно, что априорная неопределенность статистического описания х и является несущественной. Само правило решения  , обладающее таким свойством, является равномерно наилучшим (по аналогии с терминологией, используемой для двухальтернативных задач, оно может быть названо равномерно наиболее мощным правилом решения) для заданных классов распределений вероятности Pl и P0, поскольку оно обеспечивает абсолютную оптимальность при любой априорной неопределенности в пределах этих классов. Это правило обладает свойствами инвариантности, так как оно является одинаковым для любых распределений .данных наблюдений х и параметров , в пределах классов Pl и P0, соответствующих имеющейся априорной неопределенности. Так, правило решения (4.2.6) является равномерно наиболее мощным для класса задач различения сигналов, наблюдаемых на фоне гауссовых помех неизвестной интенсивности.
, обладающее таким свойством, является равномерно наилучшим (по аналогии с терминологией, используемой для двухальтернативных задач, оно может быть названо равномерно наиболее мощным правилом решения) для заданных классов распределений вероятности Pl и P0, поскольку оно обеспечивает абсолютную оптимальность при любой априорной неопределенности в пределах этих классов. Это правило обладает свойствами инвариантности, так как оно является одинаковым для любых распределений .данных наблюдений х и параметров , в пределах классов Pl и P0, соответствующих имеющейся априорной неопределенности. Так, правило решения (4.2.6) является равномерно наиболее мощным для класса задач различения сигналов, наблюдаемых на фоне гауссовых помех неизвестной интенсивности.
Конечно, существование подобных точных правил решений можно ожидать в довольно исключительных случаях, однако сам факт их наличия делает целесообразным при решении задач синтеза в условиях априорной неопределенности прежде всего осуществить проверку существенности этой неопределенности стандартными байесовыми методами. Из (4.2.8) ясно, что априорная неопределенность заведомо является несущественной, если апостериорное распределение вероятностей имеет плотность
 ,
,
одинаковую для всех Pl и P0 . Можно найти и другие достаточно общие или, наоборот, конкретные условия, когда значение , минимизирующее апостериорный риск, не зависит от априорной неопределенности.
Второе и, пожалуй, более важное обстоятельство заключается в том, что значительно чаще существуют приближенно равномерно наилучшие правила решения. Практически это имеет место в различного рода асимптотических случаях - при большом объеме данных наблюдения х, малой интенсивности помех, затрудняющих правильное принятие решения и т. п., одним словом, тогда, когда получающееся решение является «хорошим», то есть обладает высоким качеством и дает малый риск. Фактически решение задачи синтеза оптимальной системы в условиях априорной неопределенности так или иначе сводится к выявлению условий существования приближенного равномерно наилучшего решающего правила и разработке конкретных методов его нахождения.
Дата добавления: 2018-05-10; просмотров: 1306;
Поиск по сайту
Узнать еще
- АПРИОРНАЯ НЕОПРЕДЕЛЕННОСТЬ И ВОЗМОЖНЫЕ СПОСОБЫ НЕПОЛНОГО СТАТИСТИЧЕСКОГО ОПИСАНИЯ
- Вопрос №47. Социальный характер форм познания. Развитие форм познания – существенная характеристика из истории человеческого общества.
- Контроль уменьшает неопределенность, характерную для изменчивой внешней среды организации.
- Методы совершенствования спортивной техники в ситуациях с пространственной и временной неопределённостью в вашем виде восточных боевых искусств.
- Неопределённость измерений
- Неопределенность состава соединений в растворах
- Неопределенность, количество информации и энтропия

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
