Регулирование угловой скорости в разомкнутой системе Г-Д.
Система Г-Д позволяет осуществить качественное регулирование в широких пределах с высокими показателями. При этом существует принципиальная возможность:
- регулирования изменением  подводимомго к якорю двигателя (нижний диапазон релулирования);
подводимомго к якорю двигателя (нижний диапазон релулирования);
- регулирования изменением магнитного потока  (верхний диапазон релулирования);
(верхний диапазон релулирования);
· Рассмотрим нижний диапазон релулирования:
Изменение напряжения на зажимах якорной цепи двигателя осуществляется за счёт изменения ЭДС генератора.
При этом  .
.
Изменение  генератора осуществляется за счёт изменениея магнитного потока генератора
генератора осуществляется за счёт изменениея магнитного потока генератора  с помощью
с помощью  . Если реостат будет полностью выведен, то при этом магнитный поток генератра будет равен,
. Если реостат будет полностью выведен, то при этом магнитный поток генератра будет равен,  ;
;  ;
; 
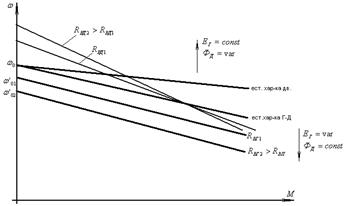
Рис.8
 уравнение механической характеристики при питании двигателя от сети
уравнение механической характеристики при питании двигателя от сети
 уравнение механической характеристики в системе Г-Д
уравнение механической характеристики в системе Г-Д
Для снижения угловой скорости ω, вводится. При увеличении снижается ЭДС генератора, соответственно напряжение на зажимах якорной цепи двигателя и угловая скорость вращения двигателя. Регулировачные характеристики при этом распологаются параллельно и ниже естественной характеристики системы Г-Д.
Необходимо отметить, что при этом магнитный поток двигателя не меняется Ф=Фном, т.е. реостат  полностью выведен.
полностью выведен.
Нижняя часть диапазона регулирования составляет Д=10:1
· Рассмотрим верхнюю часть диапазона регулирования:
При полностью выведенном сопротивлении и  на зажимах двигателя (при условии, что выведен), при этих условиях , что соответствует естественной характеристики системы Г-Д. Для уменьшения магнитного потока и как следствие увеличения угловой скоростидвигателя, реостат постепенно вводится. При увеличении магнитный поток Ф уменьшается, это проиллюстрировано механической регулировочной характеристикой верхнего диапазона (
на зажимах двигателя (при условии, что выведен), при этих условиях , что соответствует естественной характеристики системы Г-Д. Для уменьшения магнитного потока и как следствие увеличения угловой скоростидвигателя, реостат постепенно вводится. При увеличении магнитный поток Ф уменьшается, это проиллюстрировано механической регулировочной характеристикой верхнего диапазона (  и выше). Следует отметить, что при этом всегда полностью выведен.
и выше). Следует отметить, что при этом всегда полностью выведен.
Верхняя часть диапазона регулирования составляет Д=2:1
Суммарные показатели качества регулирования системы Г-Д следующие:
1. направление двузонное;
2. высокие энергетические показатели;
3. плавность высокая
4. стабильность в нижней части диапазона высокая, в верхней части низкая;
5. допустимая нагрузка на валу:
нижняя часть при 
верхняя часть при 
6.  (
(  нижняя часть;
нижняя часть;  верхняя часть).
верхняя часть).
Дата добавления: 2017-11-21; просмотров: 1522;
Поиск по сайту
Узнать еще
- I.5.3 КОСМИЧЕСКИЕ СКОРОСТИ
- I.9. Несовместимость матери и плода по системе АВ0
- II.5. Несовместимость матери и плода по системе Резус
- Pиc. 67. Зависимость скорости осаждения от величины катодно-анодного отношения
- VII. Регулирование частоты вращения двигателя
- А НЕ О СИСТЕМЕ: КОРОТКАЯ ПОЗИЦИЯ ПО ФУНТУ СТЕРЛИНГОВ, НЕПРЕРЫВНЫЕ ФЬЮЧЕРСЫ
- А) Расчет рамы в системе пространственного блока при
- Абсолютные скорости изменения критериев оценки УБП

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
