Рекуперативное торможение
Автоматизированный ЭП типовых ПМ и ПК.
Основные понятия и определения.
Автоматизированный ЭП – совокупность электрических, электромеханических, логических, алгоритмических и т.д. устройств, предназначенных для автоматизированного выполнения следующих функций:
1. пуск;
2. регулирование координат (скорости, момента, положения) в заданных пределах;
3. торможение;
4. реверс;
В качестве основных задач АЭП рассматриваются:
- точное соблюдение технологического режима;
- энергосбережение;
- экологичность и безопасность;
При рассмотрении того или иного вида автоматического ЭП мы будем рассматривать устройство, принцип действия автоматизированных систем, возможные варианты схем, качество выполнения перечисленных функции и их показатели: классические, технико-экономические, потребительские и т.д..
Автоматизированный ЭП с ДПТ.
Автоматизированный ЭП с ДПТ до недавнего времени было принято относить к единственному типу регулируемых ЭП, в частности в ПУЭ до сих пор применительно к области использования ДПТ существует следующая формулировка: «ДПТ предназначены для использования регулируемых ЭП».
В настоящее время эта формулировка устарела, но несомненным, является то, что ЭП с ДПТ и по сей день – является наиболее динамичным видом ЭП, позволяющим непосредственно управлять моментом двигателя.
Функции автоматизированных ЭП на базе ДПТ.
К ним относятся (основные функции):
1. пуск
2. торможение
3. регулирование координат (скорости, момента)
4. реверс
Пуск.
Пуск - переходный процесс при изменении скорости двигателя от ω=0, до ω=ωном .
Основными задачами, которые выполняют автоматизированный ЭП, в процессе пуска является разгон ЭД в заданный промежуток времени при обеспечении плавности и отсутствии термической перегрузки. При этом, в процессе пуска должно поддерживается постоянство  (пиковых моментов и моментов переключения) и
(пиковых моментов и моментов переключения) и 
Существуют 2 принципиальные возможности такого пуска:
1. реостатный
2. пуск при пониженном напряжении
Ø реостатный пускуправляется:
ü в функции времени
ü в функции тока
ü в функции напряжения
ü в функции момента
ü в функции угловой скорости
Чаще всего управление реостатным пуском осуществляется в функции времени и реализуется с помощью релейно-контакторных схем управления.
Процесс реостатногопуска можно проиллюстрировать:
Преимуществотаких систем:
üпростота
Недостатки:
üнизкая надёжность из-за большого числа контактов
üотсутствие быстродействия
Ø пуск при пониженном напряжении, управляется:
ü в функции тока
ü в функции напряжения
ü в функции момента
ü в функции угловой скорости
Реализуется в релейно-контакторных автоматизированных системах
Г-Д, УСП-Д, ШИР-Д.
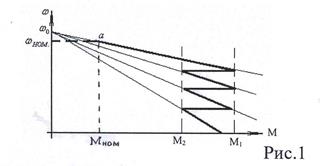
Процесс пуска при пониженном напряжении можно
проиллюстрировать:
Рис.2
Преимущества:
ü количество ступеней не ограниченно
ü значительно легче поддерживается постоянство
ü наиболее плавный пуск
ü меньше износ двигателя
Недостатки:
ü большая первоначальная стоимость оборудования
Торможение.
В процессе торможения АЭП выполняет следующие задачи:
ü быстрая и точная остановка двигателя в заданное время при условии минимизации потерь мощности и минимизации термической перегрузки двигателя.
В автоматизированных системах с ДПТ используется 3 способа торможения:
1. рекуперативное торможение
2. торможение противовключением
3. динамическое торможение
4.
Рекуперативное торможение
Рекуперативное торможение легко реализуется в системе Г-Д, а в системах ШИР-Д, УСП-Д значительно сложнее.
Рекуперативное торможение управляется чаще всего  .
.
Реализуется:
- понижением напряжения на зажимах якоря, первый скачок должен быть таким, чтобы рабочая точка переместилась во второй квадрант координатной плоскости.
 - дальнейшее изменение напряжения должно быть таким, чтобы рабочая точка не выходила за пределы второго квадранта.
- дальнейшее изменение напряжения должно быть таким, чтобы рабочая точка не выходила за пределы второго квадранта.
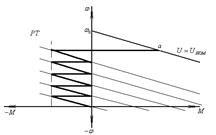
Рис.3
Преимущества:
ü высокая энергетическая эффективность (за счёт рекуперации преобразованной энергии)
ü плавность
ü возможность управлять технологическим процессом
Недостатки:
ü сложность реализации остановки двигателя в рекуперативном режиме
Дата добавления: 2017-11-21; просмотров: 1470;
Поиск по сайту
Узнать еще
- Безусловное торможение. Сущность внешнего и запредельного торможения. Условное торможение, его виды.
- В процессе эксплуатации пути есть участки, на которых регулярно используются торможение подвижного состава. К таким участкам относятся
- Возбуждение и торможение
- Вопрос 2.2. Торможение.
- Динамическое торможение (ДТ)
- Дифференциальные реле с торможением
- Е положение ручки крана - служебное торможение
- Механическое торможение

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
