Уравнение движения электропривода
Когда момент производственного механизма и момент двигателя совпадают, а двигатель работает на устойчивом участке механической характеристики с постоянной скоростью, имеет место установившийся режим работы электропривода. Однако во время работы параметры механизма могут меняться (момент инерции, момент сопротивления, изменение управляющих либо возмущающих воздействий). В этих случаях возникает режим перехода от одного установившегося состояния в другое. Такой режим называют переходным.
Уравнение равновесия моментов для вращательного движения
 , (1.2)
, (1.2)
где  – суммарный момент инерции,
– суммарный момент инерции,  - ускорение привода.
- ускорение привода.
Уравнение (1.2) часто называют основным уравнением движения привода. Уравнение показывает, что развиваемый двигателем вращающий момент  уравновешивается моментом сопротивления
уравновешивается моментом сопротивления  на его валу и динамическим моментом
на его валу и динамическим моментом  .
.
Разницу между моментом двигателя и статическим моментом называют динамическим моментом
 .
.
Из анализа основного уравнения движения можно сделать следующие выводы:
1) при  имеет место ускорение привода –
имеет место ускорение привода –  ;
;
2) при  имеет место замедление привода –
имеет место замедление привода –  ;
;
3) при равенстве моментов двигателя и сопротивления  привод работает в установившемся режиме работы
привод работает в установившемся режиме работы  .
.
Динамический момент появляется только во время переходных режимов, когда изменяется скорость привода. При ускорении этот момент направлен против движения, а при торможении поддерживает движение.
С энергетической точки зрения режимы работы электропривода разделяются на двигательные и тормозные, отличающиеся направлением потока энергии через механические передачи привода. Двигательный режим обычно соответствует прямому направлению, тормозной – обратному. Характерным признаком двигательного режима является совпадение знаков скорости и момента двигателя; в тормозном режиме их знаки не совпадают.
В установившемся режиме работы имеет место статическая устойчивость привода, то есть такое состояние установившегося режима работы привода, при котором случайно возникающие отклонения скорости от установившегося значения привод возвратится в точку установившегося режима. При неустойчивом движении любое отклонение от установившееся скорости приведет к изменению состояния привода – возникнет переходный режим.
Привод статически устойчив, если в точке установившегося режима выполняется условие

или
 .
.
Итак, если привод статически устойчив, то при положительном приращении угловой скорости момент двигателя окажется меньше статического момента и привод вследствие этого затормозится до прежнего значения скорости. При отрицательном приращении скорости момент двигателя будет больше момента сопротивления, и привод разгонится до прежнего значения скорости.
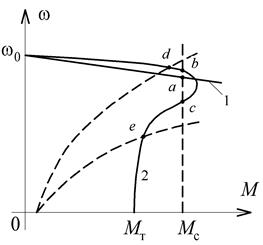
При постоянном моменте нагрузки статическая устойчивость будет определяться только жесткостью механической характеристики двигателя, так как  . Если она отрицательна, то работа в установившемся режиме устойчива (точка а на рис. 2.9)
. Если она отрицательна, то работа в установившемся режиме устойчива (точка а на рис. 2.9)  .
.
Если использовать асинхронный двигатель с короткозамкнутым ротором и нагрузить его постоянным моментом, то в точке b будет иметь место установившийся режим работы, так как  , а в точке c режим не устойчивый, так как жесткость механической характеристики двигателя положительна. При работе АД с КЗР на механизм с вентиляторной характеристикой устойчивый режим будет наблюдаться в точках d и e.
, а в точке c режим не устойчивый, так как жесткость механической характеристики двигателя положительна. При работе АД с КЗР на механизм с вентиляторной характеристикой устойчивый режим будет наблюдаться в точках d и e.
|
| 2.9. К определению статической устойчивости привода |
Дата добавления: 2017-11-21; просмотров: 1632;
Поиск по сайту
Узнать еще
- I серия. ДВИЖЕНИЯ ВЫПОЛНЯЮТСЯ НА КОЛЕНЯХ.
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- I.1.4 ИДЕАЛЬНЫЙ ГАЗ. ГАЗОВЫЕ ЗАКОНЫ. УРАВНЕНИЕ СОСТОЯНИЯ ИДЕАЛЬНОГО ГАЗА
- I.1.6 ОСНОВНОЕ УРАВНЕНИЕ КИНЕТИЧЕСКОЙ ТЕОРИИ ГАЗОВ. ЗАКОН РАВНОМЕРНОГО РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ ПО СТЕПЕНЯМ СВОБОДЫ
- I.3.1 УРАВНЕНИЕ ВАН-ДЕР-ВААЛЬСА
- I.4.2 ОСНОВНОЙ ЗАКОН ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- I.4.3 РАБОТА. МОЩНОСТЬ. ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- I.6.3 ДВИЖЕНИЕ ЖИДКОСТЕЙ И ГАЗОВ. УРАВНЕНИЕ БЕРНУЛЛИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
