Время ускорения и замедления привода
Время переходных режимов привода: пуска, торможения, перехода от одной скорости к другой влияет на производительность механизма. Определение времени переходных процессов основано на интегрировании уравнения движения привода. Разделяя переменные, получим:
 .
.
Время переходного режима при изменении скорости от  до
до 
 .
.
Если принять, что  , результатом решения интеграла будет
, результатом решения интеграла будет
 .
.
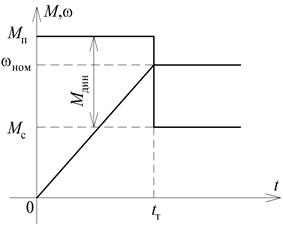
Рассчитаем время пуска привода от состояния покоя (  ) до номинальной скорости
) до номинальной скорости  с пусковым моментом
с пусковым моментом  при наличии на валу двигателя момента сопротивления
при наличии на валу двигателя момента сопротивления  (см. рис. 2.10)
(см. рис. 2.10)
 .
.
Если требуется точно рассчитать время переходного процесса для привода с асинхронным двигателем (  ), то следует использовать формулу в интегралах.
), то следует использовать формулу в интегралах.
Теоретически, полное время переходного процесса равно бесконечности. Поэтому в практических расчетах обычно считают, что процесс разбега заканчивается при скорости, равной не , а  , тогда время процесса получается конечное.
, тогда время процесса получается конечное.
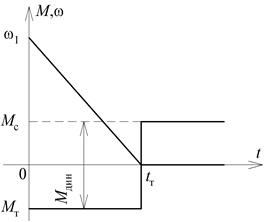
В тех случаях, когда динамический момент имеет отрицательное значение, привод замедляется (рис. 2.11). Для этого случая уравнение движения будет иметь вид:
 .
.
Привод будет замедляться и в том случае, когда двигатель будет развивать момент, меньший статического, по абсолютному значению.
| 
|
| Рис. 2.10. Пусковой график привода | Рис. 2.11. Тормозной график привода |
Время торможения привода
 .
.
Для частного случая, при ,
 .
.
Можно также посчитать оптимальное значение передаточного числа ПМ  при заданных значениях моментов инерции двигателя и механизма
при заданных значениях моментов инерции двигателя и механизма  и
и  , а также момента сопротивления .
, а также момента сопротивления .
Уравнение движения привода относительно рабочего вала механизма
 ,
,
где  – коэффициент, учитывающий момент инерции передач.
– коэффициент, учитывающий момент инерции передач.
Очевидно, что минимальное время будет при максимальном ускорении привода
 .
.
Для нахождения оптимального передаточного числа найдем точку максимума функции  .
.
 ,
,  .
.
Решая уравнение
 ,
,
получаем передаточное число ПМ
 .
.
Второе решение уравнения (со знаком минус перед вторым слагаемым) дает при всех соотношениях i отрицательные значения.
Дата добавления: 2017-11-21; просмотров: 1426;
Поиск по сайту
Узнать еще
- IV этап: 1980 г. – по настоящее время. Интенсивное развитие стратегического маркетинга
- Анализ и синтез систем автоматического управления электроприводами
- Атака «компромисс время-память»
- БЕССОННИЦА ВО ВРЕМЯ БЕРЕМЕННОСТИ
- В - ограничители усилия ускорения G
- В настоящее время действует введенная в 1991 г. система платежей за загрязнение окружающей среды.
- В настоящее время пользование АПОС осуществляется бесплатно или почти бесплатно.
- В настоящее время применяется целый ряд комплектных систем облицовки стен с использованием гипсокартонных листов Кнауф.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
