Приведенное механическое звено
Механическая часть электромеханической системы включает в себя все связанные движущие массы: двигателя, передаточного устройства и исполнительного механизма машины. К ротору двигателя при скорости w приложен электромагнитный момент М, под действием которого механическая часть приводится в движение. Непосредственное представление о движущихся массах установки и механических связях между ними даёт кинематическая схема электропривода.
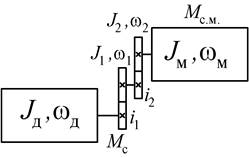
Примерная кинематическая схема электропривода с вращательным движением исполнительного органа представлена на рис. 2.1. Иногда рабочий орган механизма совершает поступательное движение (кран, лифт, строгальный станок, шлифовальный, долбежный и др.).
|
| Рис. 2.1. Кинематическая схема связи двигателя с исполнительным механизмом |
Каждый из элементов реальной кинематической цепи обладает упругостью, т.е. деформируется под нагрузкой, а в соединениях элементов имеются воздушные зазоры. Если учитывать все факторы, то расчетная схема будет очень сложной и расчет такой схемы выполняется на ЭВМ. Однако основные закономерности движения таких систем определяются наибольшими массами и зазорами и наименьшими жесткостями связей системы, что позволяет свести расчетную схему механической части привода к двухмассовой (иногда одномассовой) механической системе с эквивалентными упругими связями и с суммарным зазором, приведенным к угловой скорости вала двигателя.
Для составления расчетных схем механической части электропривода необходимо приведение всех параметров элементов кинематической цепи к одной расчетной скорости. Обычно наиболее удобным является приведение их к скорости двигателя. Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии, то есть должны выполняться условия
 ;
;
 .
.
Откуда можно найти формулы приведения

Расчетную схему механической части привода в общем случае можно свести к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции J, на которую воздействует электромагнитный момент двигателя М, и суммарный приведенный к валу двигателя момент сопротивления (статической момент)  , включающий все механические потери в системе, в том числе механические потери в двигателе.
, включающий все механические потери в системе, в том числе механические потери в двигателе.
Момент сопротивления механизма, возникающий на валу рабочей машины, состоит из двух слагаемых, соответствующих полезной работе и работе трения. Полезная работа, совершаемая производственным механизмом, связана с выполнением соответствующей технологической операции. Работа трения, совершаемая в производственном механизме, учитывается обычно КПД механических связей. Момент трения всегда направлен против движущего момента привода.
Дата добавления: 2017-11-21; просмотров: 1475;
Поиск по сайту
Узнать еще
- Австралопитековые как переходное звено от высшей обезьяны к древнему человеку.
- Апериодическое звено
- Апериодическое звено
- Апериодическое звено первого порядка
- Биогеоценоз как экологическая система, его звенья, связи между ними. Растения — начальное звено цепей питания в биогеоценозе.
- Внешнее механическое воздействие на клетку
- Во втором периоде родов необходимо рассечение промежности, чтобы уменьшить механическое воздействие на головку плода.
- Воспроизводство как звено жизненного цикла, обеспечивающее сохранение вида

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
