Виды воздействия в САУ. Процессы управления в САУ.
Виды воздействия в САУ.
Прикладываемые к САУ внешние воздействия можно разделить на задающие и возмущающие.
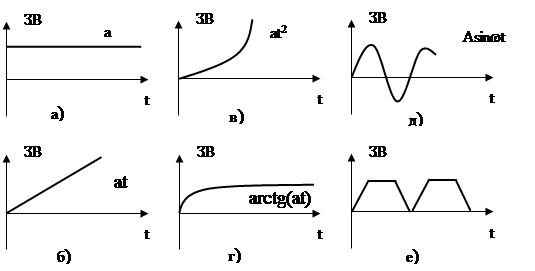 |
Задающие воздействия определяются тем законом, по которому должна изменяться управляемая величина. Например, в системе управления напряжением генератора задающее воздействие постоянно. Если управляемая величина должна изменяться по некоторой программе – задающее воздействие будет некоторой заранее заданной функцией времени (рис.16а). Возможна ситуация (слежение за целью, например), когда это воздействие заранее не известно и является некоторой функцией времени. Вид задающего воздействия может быть различным, и он определяется условием работы системы. В частности могут рассматриваться постоянное задающее воздействие (ЗВ) (рис.16а), ЗВ изменяющееся по линейному закону (рис.1б), по квадратичному закону (рис. 16в).
Рис. 16
При слежении за равномерно движущейся целью изменение азимута цели определяется зависимостью  (рис. 16г). В ряде случаев при решении задач стабилизации с учетом качки задающее воздействие представляется гармонической функцией (рис.16д). Задающее воздействие может быть некоторой периодической функцией достаточно произвольного вида (рис.16е) (например, в системах управления температурой нагревательных устройств)
(рис. 16г). В ряде случаев при решении задач стабилизации с учетом качки задающее воздействие представляется гармонической функцией (рис.16д). Задающее воздействие может быть некоторой периодической функцией достаточно произвольного вида (рис.16е) (например, в системах управления температурой нагревательных устройств)
Возмущающее воздействие в зависимости от причин их возникновения можно разделить на нагрузку и помехи.
Нагрузкой является внешнее воздействие, приложенное к объекту управления, не зависящее от управляющего устройства (регулятора) и обусловленное нормальной работой этого объекта. (Например, момент сопротивления при перемещении орудия, наличие потребителей у генератора).
Помехи – это внешние воздействия, преложенные к отдельным элементам системы и не связанные с ее нормальной работой. Помехи существуют потому, что конструкция системы не позволяет их устранить.
Возмущающие воздействия могут изменяться по определенным законам, аналогично рассмотренным для ЗВ, а может изменяться случайно. В первом случае говорят о детерминированном, а во втором случае – о стохастическом законах изменения возмущающих воздействий.
Обычно воздействия, наблюдаемые в САУ, представляют собой достаточно сложные и не всегда известные функции.
Поэтому при теоретическом исследовании САУ применяют идеальные или типовые воздействия. Законы изменения этих воздействий являются наиболее типичными для заданного класса САУ или они соответствуют наиболее тяжелым условиям их работы.
В качестве типовых воздействий на практике наиболее часто используют следующие:
1.Единичная ступенчатая функция. Это воздействие применяют, когда процесс регулирования вызван резким изменением нагрузки или быстрым изменением задающей величины
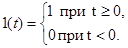
2.Дельта-функция. Это воздействие применяют, когда процесс регулирования вызван мгновенным “толчком”
 ,
, 
3.Гармоническое воздействие

4.Воздействия, изменяющиеся с постоянной скоростью

5.Воздействия, изменяющиеся с постоянным ускорением

Процессы управления в САУ.
Изменение задающего или возмущающего воздействия приводит к отклонению управляемой величины от ее предшествующего значения. Это отклонение с течением времени может неограниченно возрастать, что соответствует неустойчивости системы. Неустойчивая система неработоспособна. Поэтому одним из требований, предъявляемых к САУ, является требование устойчивости.
Требование устойчивости САУ является необходимым, но не достаточным условием ее успешной работы. Даже в устойчивой системе отклонение управляемой величины не может равняться нулю во все моменты времени. Чем меньше это отклонение, тем она лучше.
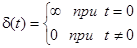
Рассмотрим возможные варианты изменения управляемой величины при скачкообразном изменении задающей величины (см. рис. 17).
 |
Рис. 17
Отклонение управляемой величин от заданного значения может при t®¥ стремится к постоянной, отличной от нуля, величине или стремиться к нулю. В первом случае система называется статической по отношению к задающему воздействию. Во втором случае система является астатической. Аналогичные графики изменения управляемой величины можно привести для случая скачкообразного изменения нагрузки (возмущающего воздействия) (см. рис.18)

Рис. 18
Обозначим отклонение регулируемой величины от заданного значения через Dx. Графики изменения Dx(t) для статической и астатической системы показаны на рисунке.
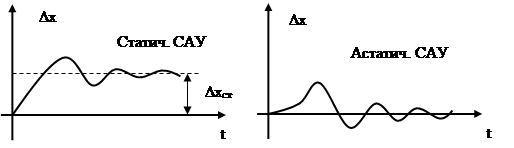 |
Рис. 19
В данном случае функцию Dx(t) можно представить в виде суммы Dxст=const и Dxд(t)= Dx(t)- Dxст. В случае астатической системы Dxст=0.
Для оценки качества работы САУ используются основные, наиболее важные показатели, характеризующие процесс измения управляемой величины. Рассмотрим изменение управляемой величины при ступенчатом входном воздействии, приложенном в момент времени t=0 (см. рис.).
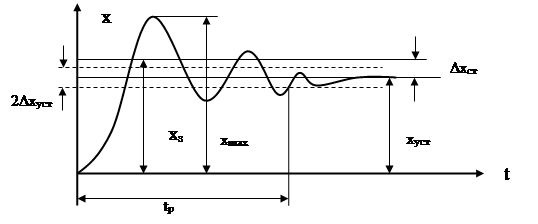 |
Рис. 20
К основным показателям, характеризующим процесс изменения управляемой величины (показателям процесса управления) относят:
1.Величину статического отклонения (в общем случае установившееся отклонение).
2.Максимальное значение управляемой величины. Оно характеризуется так называемым перерегулированием
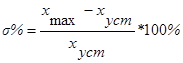
Обычно требуют, чтобы величина s не превышала 10-30%.
3.Время регулирования (длительность переходного процесса). Это время tр, по истечении которого выполняется условие
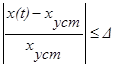 .
.
Величина D принимается равной 0.05 для астатических систем и D=0.1 для статических систем.
В рассмотренном случае показатели s и tр определяются непосредственно по графику изменения управляемой величины. При переменных задающих воздействиях может использоваться процесс изменения отношения  . Например, процесс изменения управляемой величины при линейном входном воздействии для системы слежения орудия за прицелом может иметь вид, показанный на (рис.а.)
. Например, процесс изменения управляемой величины при линейном входном воздействии для системы слежения орудия за прицелом может иметь вид, показанный на (рис.а.)
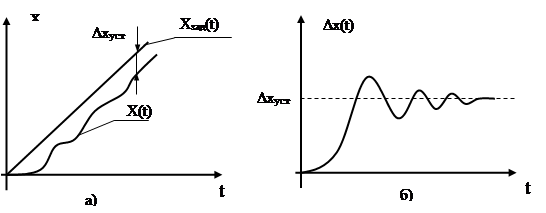 |
Рис. 21
При этом процесс управления характеризуется величиной Dxуст и величинами s и tр, определяемыми по графику Dx(t).
При гармоническом задающем воздействии управляемая величина с течением времени также стремится к гармоническому сигналу. Соответственно и Dx(t) с течением времени стремится к гармонической функции (см. рис. 22).
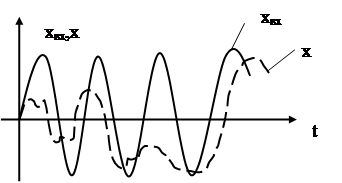 |
Рис. 22
Обычно требования к процессу управления формулируются в виде наибольших допустимых значений показателей качества, т.е. должно быть

В ряде случаев предъявляются дополнительные требования, например, число колебаний на заданном интервале не больше заданного, монотонность процесса и т.п. Для гармонического входного воздействия важным показателем качества является амплитуда и фаза отклонения.
| <== предыдущая лекция | | | следующая лекция ==> |
| Синтез линейных стационарных систем автоматического управления. | | | Синтез линейных стационарных систем автоматического управления (продолжение). |
Дата добавления: 2017-10-04; просмотров: 7091;
Поиск по сайту
Узнать еще
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- CRM - стратегия управления взаимоотношениями с клиентом
- HTML заголовок и его виды
- I. Выборы: понятие, значение и виды.
- I.1.3 ТЕРМОДИНАМИЧЕСКИЙ ПРОЦЕСС. ИЗОПРОЦЕССЫ
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. Понятие и виды элиты.
- III. Старение и усталость. Вибрация. Коррозия деталей машин. Краткие сведения по теории трения. Виды трения. Основные требования и определения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
