Сравнительная оценка приводов.
Гидравлический привод: используется в ≈ 30% ПР. Гидравлические роботы обладают, как правило, большой и сверхбольшой грузоподъемностью. Гидропривод обладает следующими достоинствами:
- высоким быстродействием;
- используется в качестве рабочего тела несжимаемой жидкости, что позволяет получить высокую стабильность скорости выходного звена при изменении нагрузки в широком диапазоне, высокую точность позиционирования, высокую частоту реверсирования движения;
- бесступенчатость регулирования скорости выходного звена;
- большой коэффициент усиления по мощности (свыше 1000), высокий к.п.д. при различных способах регулирования;
- малая относительная масса гидромашин;
- отсутствие дополнительных кинематических цепей между выходным звеном привода и РО робота.
К основным недостаткам гидропривода относят:
- использование в качестве рабочего тела жидкости требует создания специальных насосных установок. Вследствие требования мобильности и автономности роботов насосные установки должны устанавливаться в конструкции робота, что резко увеличивает его массу;
- использование в основном рабочей жидкости на нефтяной основе исключает возможность применения роботов с таким приводом в пожаро- и взрывоопасной среде; кроме того, наличие паров жидкости на нефтяной основе плотностью 5 г∕м3 (ГОСТ 12.1.005-76) является опасным для здоровья;
- ресурс рабочей жидкости ограничен, что приводит к частой смене всего объема жидкости, который в насосном участке достигает значительной величины. Это приводит к увеличению стоимости обслуживания;
- стоимость элементов гидроприводов выше, чем пневмо- и электропривода;
- предел рабочих температур жидкости привода ограничен (1500С), что приводит к невозможности его эксплуатации в среде с повышенной температурой; кроме того, с изменением температурной жидкости в процессе работы изменяются свойства жидкости, а следовательно, и скорость выходного звена.
Пневматический привод: 40 – 50% всех выпускаемых ПР имеют пневматический привод. ПР с пневматическими приводами обладают грузоподъемностью в среднем до 20 кг (при мощности 60 – 800 Вт) для одной степени подвижности.
Основные преимущества:
· простота и надежность конструкции;
· высокая скорость выходного звена привода:
- при линейном перемещении до 1000 мм∕с;
- при вращении до 60 мин-1;
· использование сжатого воздуха в качестве рабочего тела;
· возможность использования сжатого воздуха из заводской пневмосети с давлением 0,5 – 0,6 МПа;
· высокая точность позиционирования по точкам;
· возможность работы в агрессивной и пожароопасной среде;
· отсутствие промежуточных передаточных звеньев между выходным звеном привода и РО работа;
· высокий к.п.д. (0,8);
· малая относительная масса конструкции привода на единицу развиваемой мощности;
· простота компоновки;
· низкая стоимость как конструкции привода, так и ПР и малые затраты на обслуживание;
· малая чувствительность к ударам, перегрузкам и вибрациям.
Недостатки:
- нестабильность скоростного выходного звена при изменении нагрузки вследствие сжимаемости рабочего тела при малых и средних давлениях;
- ограниченность точек позиционирования (чаще две точки) в приводах с цикловым управлением; увеличение числа точек позиционирования требует использование специальных конструкций позиционирующих устройств;
- необходимость демпфирования движения выходного звена в конце хода, т.к. при больших скоростях движение выходного звена при подходе к упорам возможны сильные удары;
- наличие шума при работе привода.
Электропривод. Электроприводы активно используются в ПР. Они не применяются только в ПР, предназначенных для работы во взрывоопасных средах и для работы с машинами, оснащенными гидросистемами, по соображению унификации.
В ПР применяются приводы с высокомоментным двигателем постоянного тока, асинхронным двигателем, бесколлекторными двигателями постоянного тока и силовыми шаговыми двигателями.
Особенностями электропривода являются расширенный (до 0,05 Н∙м) диапазон малых моментов, повышенная максимальная частота вращения (15∙103 мин-1), уменьшенная инерция двигателей, возможность встройки в двигатель э\м тормозов и различных датчиков, а также механических и волновых передач.
Основные достоинства:
- компактная конструкция двигателя;
- высокое быстродействие;
- равномерность вращения;
- высокий крутящий момент на максимальной скорости;
- высокая надежность;
- высокая точность (за счет применения цифровой измерительной системы с высокоточным импульсным датчиком);
- низкий уровень шума и вибрации;
- эксплуатация без проверки и обслуживания (использование бесколлекторных двигателей).
Недостатки:
- наличие щеток в коллекторах двигателя постоянного тока;
- ограниченное использование во взрывоопасных средах;
- большая зависимость скорости выходного звена от нагрузки, что приводит к необходимости создания дополнительных контуров регулирования;
- наличие дополнительной кинематической цепи между электродвигателем и РО ПР.
По виду использования двигателей приводы можно разделить:
- приводы с двигателем поступательной прямолинейного перемещения (гидроцилиндры, пневмоцилиндры, линейные электродвигатели);
- приводы с вращательным малооборотными двигателями (роторные гидро- и пневмоцилиндры, радиально-поршневые гидромоторы);
- приводы с высокооборотными вращательными двигателями (электродвигатели, аксиально-поршневые гидромоторы, пневмодвигатели).
Приводы первых двух типов в некоторых случаях могут соединяться с исполнительными звеньями вообще без помощи передаточных механизмов. Т.е. непосредственно или с помощью компенсирующих муфт. При этом конструктивная механическая система значительно упрощается. Приводы третьего типа требуют обязательного наличия редукторов для согласования скоростного движения и силовых характеристик ведущих валов двигателей и исполнительных звеньев.
По типу управления различают:
- Разомкнутые приводы с позиционированием по жестким механическим или другого вида упорам; для этих приводов характерно использование цикловых СУ, т.к. в этом случае величина перемещения не программируется, а устанавливается заранее регулировкой упоров;
- Разомкнутые приводы с цифровым управлением, где в качестве двигателей может быть использованы шаговые двигатели или составные цилиндры (позиционеры);
- Следящие приводы с обратной связью по положению, а также по некоторым другим параметрам (скорости, силе и т.д.). В ПР чаще используется следящий гидропривод и электропривод постоянного тока. Эти приводы пригодны как для позиционных, так и контурных СУ.
По способу регулирования. Поступающей и отводимой от механической системы энергии: активный и пассивный. В активном приводе регулируются активные силы, задаваемые двигателем; в пассивном – силы, отбираемые от механической системы (тормозные силы). Большинство использование приводов является активным.
При выборе типа привода рассматриваются факторы, связанные с функционированием ПР: технические характеристики ПР, условия эксплуатации, характеристики объектов, с которыми ПР должен взаимодействовать, факторы технологически-экономического характера – простота, технологичность, стоимость, энергоемкость и др. Важным является наличие и качество комплектующих. Выбор типа привода должен происходить совместно с определением типа и структуры СУ.
Важной задачей является определение потребностей мощности двигателя, которые на стадии проектирования производят приближенно ввиду отсутствия точных знаний массы звеньев и координат их центров тяжести.
Рассмотрим манипулятор, работающий в сферической системе координат.
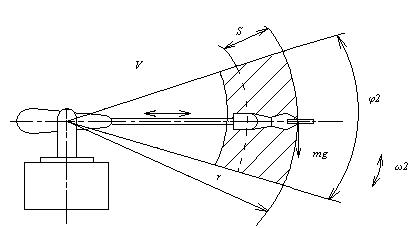
Заданы следующие параметры: m – масса переносимого груза, кг; r – максимальный радиус действия, м; φ, S – пределы перемещения груза по координатам, рад или м; ω, V – номинальная скорость перемещения груза по координате, с-1, м/с.
Мощность двигателя поворотной колонны:
 (1)
(1)
где Мн – момент неуравновешенности, возникающий от неуравновешенности масс (включая переносимый груз) относительно оси вращения, Н·м;
Мп – динамический момент, возникающий в периоды разгона и торможения, Н·м;
η – к.п.д. передачи, связывающий двигатель с используемым звеном.
Динамический момент:
 (2)
(2)
где ε – угловая скорость, м/с2;
Yн – момент инерции вращающихся частей машины, кг·м2.
Для оценки динамического момента сделаем следующие допущения: закон изменения скорости по координате – трапецеидальный, т.е. разгон и замедление происходит с постоянным ускорением; длина пути разгона φр(Sр) = длине пути замедления φт(Sт) и составляет некоторую часть общего пути перемещения φ(S): φр = φт = к1·φ.
Величина коэффициента к1 определим исходя из следующего: при заданной скорости (ω, V) перемещения по координате быстродействие будет тем больше, чем меньше к1. Но слишком малая величина к1 вызовет большие динамические перегрузки на механизмы привода, что приведет к преждевременному выходу из строя ПР. Задаваясь допустимой величиной таких нагрузок, равной 1,5. При этом максимальная величина ускорения переносимого груза и элементов конструкции ПР не превышает g/2 или 5 м/с2.
Для привода ПР с линейным перемещением на 1 м, скоростью 1 м/с длина пути разгона
 , а
, а 
Этим значением к1 и пользуются при ориентировочном расчете мощности.
Ускорение, выраженное через параметры, заданные в условии, имеет вид:
 , (3)
, (3)
Момент инерции:
 , (4)
, (4)
где  - момент инерции от максимально переносимого ПР груза на максимальном радиусе вращения;
- момент инерции от максимально переносимого ПР груза на максимальном радиусе вращения;
Yм – момент инерции вращающихся частей манипулятора при максимальном радиусе переноса;
к2 – коэффициент конструкции (к2экспериментальн. = 1,8 ÷ 2,3).
Примем к2 = 2. Подставив значения величины из (3), (4) в формулу (2) получим выражение для динамического момента
 (5)
(5)
Момент неуравновешенности
 ,
,
где к3 – коэффициент конструкции, учитывающий момент неуравновешенности подвижных частей относительно оси вращения;
α – угол наклона плоскости вращения к горизонтали.
Подставляя (5) и (6) в формулу (1), получим выражение для расчета мощности привода вращательных координат:
 (7)
(7)
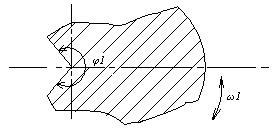
Для механизма вращения руки относительно вертикальной оси ОZ α = 0.При значениях к1 = 0,1 и к2 = 2 получим мощность в Вт:
 (8)
(8)
Для механизма качания руки относительно горизонтальной оси ОХ α = 1,57 рад. Принимая к3 = 1 (механизм манипулятора уравновешен без груза), получим мощность в Вт:
 (9)
(9)
Для координаты с прямолинейным постоянным движением мощность привода:
 (10)
(10)
где Рп - инерционная сила, действующая на привод в период разгона и замедления, Н;
Рн – сила, действующая на привод от неуравновешенности масс (в том числе переносимого груза), Н.
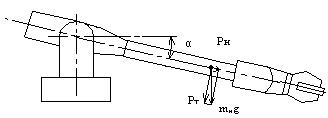
На рисунке показана расчетная схема механизма радиального выдвижения руки робота, для которой
 (11)
(11)
где к4 – коэффициент конструкции, учитывающий массу подвижных частей манипулятора.
 (mн – общая масса перемещающихся частей).
(mн – общая масса перемещающихся частей).
Рассуждая аналогично случаю с вращательной координатой, найдем выражение для линейного ускорения а и инерционной силы Рп:

 (12)
(12)
Сила Рп возникает от массы перемещающихся частей манипулятора. Наихудший вариант нагружения привода – при максимальном угле наклона α к горизонтали
 (13)
(13)
Мощность прямолинейного движения
 (14)
(14)
Для приводов с горизонтальными перемещениями α = 0, например, для манипуляторов, работающих в циклической системе координат. Тогда к1 = 0,1 и к4 = 2.
 (15)
(15)
Для приводов с вертикальным перемещением α = 1,57 рад.
 (16)
(16)
Краткая методика схематического расчета энергетических параметров привода:
- Ориентировочный расчет по исходным данным мощности двигателя (формулы (7) – (9); (14) – (16)).
- Выбор по каталогу подходящей мощности двигателя с различными ωд и Мд.
Дата добавления: 2019-12-09; просмотров: 900;
Поиск по сайту
Узнать еще
- II. Оценка материально-производственных запасов
- V. Оценка состояния здоровья детей и подростков
- А. Наилучшая статистическая оценка
- Анализ активов организации и оценка эффективности их использования.
- Анализ и оценка внутренней среды предприятия
- Анализ и оценка состояния оперативной обстановки
- Анализ и оценка финансового состояния торговой организации
- Анализ и оценка эффективности использования

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
