ДЕТАЛИ И МЕХАНИЗМЫ ПР
Направляющими манипулятора ПР называют узлы, детали или поверхности, которые обеспечивают перемещения его элементов в требуемом направлении. Различают направляющие для поступательного движения и для вращательного движения оси или точки.
По виду направляющие бывают: цилиндрическими с двумя, тремя и четырьмя стержнями; призматические с тремя или четырьмя гранями; смешанные; с шарнирно-рычажными механизмами поступательных перемещений.
По виду опор направляющие бывают: с опорами скольжения; с телами качения в виде рожков на осях или в сепараторах; с шариковыми опорами качения; с элементами упругости и др.
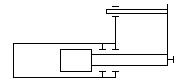
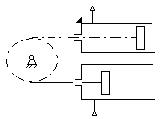
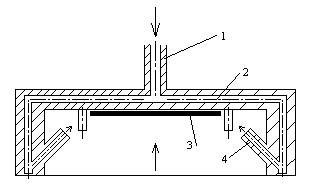
На рисунке показана схема модуля манипулятора ПР с основной и вспомогательной цилиндрическими направляющими.
Основная направляющая обеспечивает прямолинейность движения и воспринимает боковую нагрузку, перпендикулярно к оси движения. Вспомогательную направляющую, более тонкую и податливую по сравнению с основной, устанавливают для угловой фиксации места присоединения узла (каретки) передвижения ПР. Роль основной и вспомогательной направляющих может играть шток силового цилиндра.
В ПР с несколькими одинаковыми цилиндрическими направляющими последние воспринимают в равной степени все составляющие нагрузки.
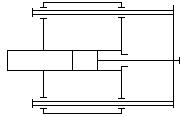
В ПР с призматическими направляющими все виды нагрузки воспринимает одна призматическая направляющая.
Наиболее распространены призматические направляющие, полученные огранкой толстостенных труб.

Высокую жесткость и хорошую угловую фиксацию обеспечивают направляющие с тремя или четырьмя широкими гранями. Они изготавливаются из проката специального профиля, из стальных конструкций или отливок.
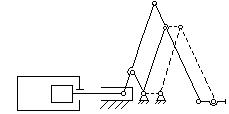
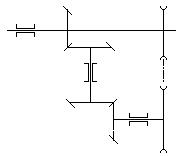
Главная особенность шарнирно-рычажных механизмов поступательных перемещений – малые продольные габаритные размеры. Поступательное перемещение входов модулей достигается соответствующей координацией с помощью цепной, зубчатой или шарнирно-рычажной передачи движения основных несущих звеньев. Этим передачи задают одинаковый угол поворота звеньев относительно неподвижного основания.
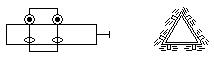
На следующем рисунке показана схема модуля манипулятора с направляющими для вращательного движения узлов ПР (стоек).
Точность перемещения исполнительного органа, легкость и плавность движения, малый износ – важнейшие требования, которые необходимо обеспечивать при конструировании направляющих.
В качестве передаточных механизмов в ПР применяют различные системы передачи движения зубчатым зацеплением; дифференциальные и планетарные, а также волновые зубчатые передачи. Применяется передача движения с помощью винтовых механизмов.
Находят применение безмофтовые передачи с замкнутым энергетическим потоком. Такие передачи позволяют осуществить полный выбор мофтов во всех составляющих звеньях путем принудительного разворота в противоположные стороны двух соосно-расположенных элементов одного из звеньев передачи.
Замыкающая передача может представлять собой передачу иного типа, чем исходная. Например, зубчатый редуктор может быть замкнут с помощью цепной или тросовой передачи.
Захватное устройство (ЗУ) манипулятора или ПР – рабочий орган для захватывания или удержания предметов производства или технологической оснастки. ЗУ должно обеспечить надежность захвата и удержания предмета производства, стабильность базирования, не допускать разрушения и повреждения предмета.
По способностям удержания объекта захватывания ЗУ делят на:
- Механические;
- Магнитные;
- Вакуумные;
- Струйные;
- Эластично-охватывающие.
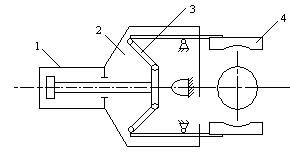
Механические ЗУ состоят из привода 1 (обычно пневмо- гидроцилиндр) передающего звена 2, системы шарниров 3 и губки 4.
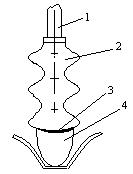
Для вакуумных ЗУ характерен амортизирующий эффект, поэтому их применяют для захвата хрупких объектов 4. Отсасывание воздуха проводится через подводы 1 и присасывающие упругим (амортизирующим).
Магнитные ЗУ используют для захвата изделий из ферромагнитных материалов.
Струйные ЗУ наиболее распространены при работе с легкими плоскими изделиями 3, например, в приборостроении. Они обычно осуществляют ориентирование и накопление, обладают простотой конструкцией и универсальностью. Состоят из корпуса 1, канала, подвода рабочей среды 2 и направляющих сопел 4.
Эластично-захвтывающие ЗУ применяют для захвата тел неправильной формы и жесткости, обеспечивая при этом податливость, приспосабливаемость к форме объекта. Приспособление обеспечивает, например, эластичной камерой, заполняемой подводимой рабочей средой.
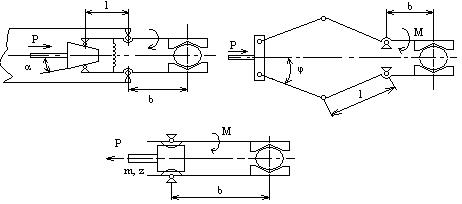
На рисунке приведены кинематические схемы основных типов механических ЗУ. По типу механизмов передачи приводной силы их подразделяют на:
- Клиновые (а);
- Рычажные (б);
- Реечные (в).
Для клинового симметричного ЗУ сила привода:
а) б)
в)
Для рычажного симметричного:

Для реечного симметричного:
 , где
, где
М – удерживающий момент, Н·м, определяется в зависимости от силы сжатия объекта в ЗУ, коэффициента трения между губками и объектом, соотношения расстояний l и b;
γ – угол клина (γ = 40 – 80);
ρ – приведенный угол трения;
ρ = 1010’ – при осях на подшипниках качения;
ρ = 30 – при осях на подшипниках скольжения;
η1, η2, η3 – КПД шарниров,
η1 = 0,9;
η2 = 0,9 – 0,95;
η3 = 0,94;
m – модуль, мм;
z – число зубьев сектора (полное);
k – коэффициент запаса, зависит от несовпадения оси захватывания объекта с осью губок, k = 1,6 – 2,0.
Дата добавления: 2019-12-09; просмотров: 686;
Поиск по сайту
Узнать еще
- III. Механизмы, средства и методы психологического воздействия.
- VI.НЕЙРОХИМИЧЕСКИЕ МЕХАНИЗМЫ ПЛАСТИЧНОСТИ И ПАМЯТИ.
- А. Детали зубчатых передач
- Акцентирование – подчёркивание какой-либо детали (шарж, карикатура).
- Аллергические реакции 1 типа (реагиновые). Стадии, медиаторы аллергии 1 типа, механизмы их действия. Клинические проявления (анафилактический шок, атопические реакции).
- Анализ технологичности детали
- Анализ технологичности конструкции детали в зависимости от ее обработки в различных типах производства
- Анализ технологичности конструкции детали.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
