Точность координатных систем.
В кинематических парах механизмов манипуляторов ПР имеются зазоры, зависящие от точно изготовленных деталей, а такие от степени их износа при работе. Из-за зазоров возникают отклонения между задаваемыми и действительными перемещениями ряда звеньев и, следовательно, в результате возникает суммарная ошибка между предполагаемым и действительным положением выходного звена (захватывающие устройства, сварочные головки и т.д.), т.е.  , где ΔΣ – общая ошибка, равная геометрической сумме ошибок по отдельным координатам;
, где ΔΣ – общая ошибка, равная геометрической сумме ошибок по отдельным координатам;  - ошибки по отдельным координатам.
- ошибки по отдельным координатам.
Для прямоугольной системы координат общая ошибка:
При равных ошибках по всем координатам общая ошибка  .
.
Для цилиндрической системы координат

При этом в прямоугольной системе координат общая ошибка не зависит от расстояния выходного звена до начала координат. В цилиндрической и сферической системах общая ошибка зависит от расстояния выходного звена (захватывающего устройства) до начала координат. Изнашивание кинематических пар звеньев манипулятора в наибольшей степени влияет на систему с цилиндрической и сферической системой координат, в наименьшей – с прямоугольной.
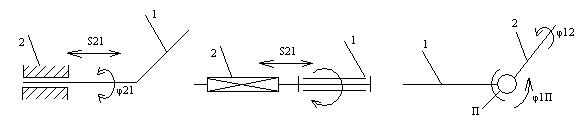
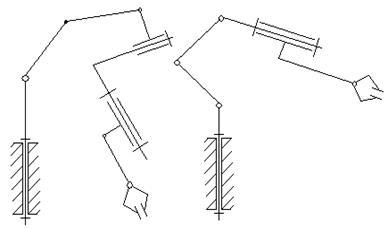
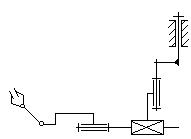
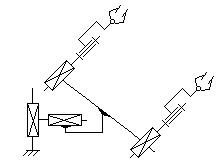
При переносных движениях манипулятора осуществляется перемещение РО ПР между любыми двумя точками рабочей зоны. Ориентирование РО в такой точке осуществляется так называемыми ориентирующими движениями. При этом могут происходить незначительные, по сравнению с переносными, смещения РО, которыми обычно пренебрегают.

а)
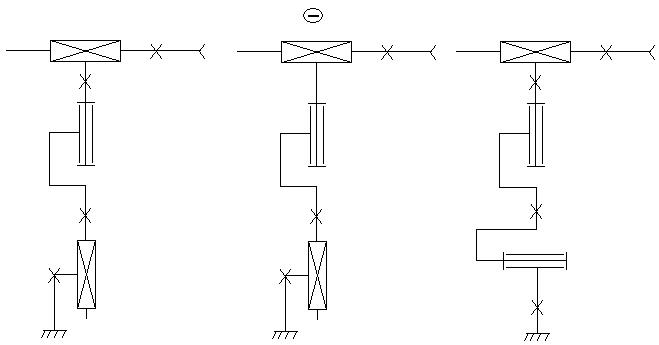
б)
Схемы кинематических пар для движений: а) переносного; б) ориентирующего.
Пары (рис. А-М ПР) а – г осуществляют перемещение захватного устройства в плоскости, пары д, е обеспечивают перемещение или поворот этой плоскости в пространстве.
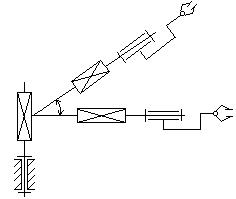
Угловую ориентацию захватывающего устройства (ЗУ) можно осуществлять как в сферической, так и в цилиндрической системе координат (Ж – К).
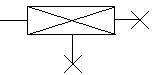
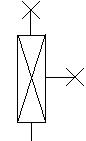
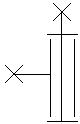
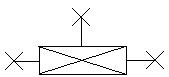
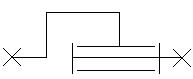
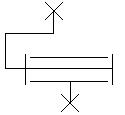
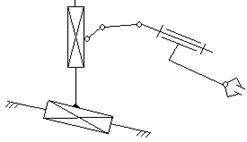
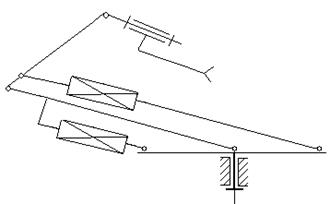
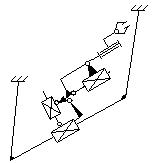
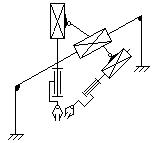
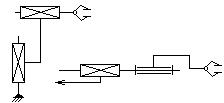
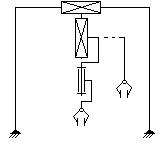
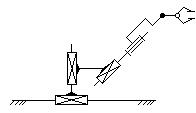
Последовательно соединяя кинематические пары и звенья, можно получить такие различные структурные схемы манипуляторов, когда каждому заданному положению ЗУ в пространстве соответствует вполне определенное положение остальных звеньев манипулятора. Обычно в механизмах ПР не применяют пары III и IV классов вследствие сложности их изготовления, их заменяют несколькими эквивалентными парами V класса.
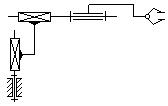
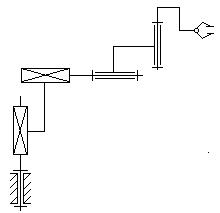
Пример подобной замены для цилиндрической пары IV класса показан на рисунке а и б, а для сферической IV класса – на рисунке в и г.
а) б) в)
г)
В первом случае число степеней подвижности эквивалентной цепи  , во втором случае
, во втором случае 
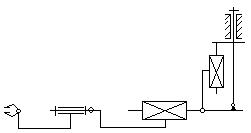
В таблице представлены кинематические структуры некоторых распространенных отечественных и зарубежных ПР.
Для привода каждого звена используют отдельный двигатель. При этом двигатели могут быть расположены как на каждом звене, так и все вместе на неподвижном звене. Применяют также смешанный тип расположения двигателей.
Распространенным является работающий в сферической системе координат ПР типа «Юнимейт» (США) и его японский аналог «Кавасаки Юнимейт». Кинематически подобны им отечественные ПР «Универсал-15» и «Универсал-50». Отечественные ПР типа «Универсал-15» имеет четыре степени подвижности, причем его рука в любом положении параллельна своему первоначальному положению.
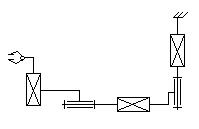
Широкое распространение получила схема ПР типа «Версатран» (США), позволяющая совершать четыре поступательных и одно вращательное движения. В аналогичной цилиндрической системе координат работают отечественные ПР «Циклон 3.01», ПР-10, «Бриг-10», УМ-1.
В прямоугольной системе координат работают ПР типа «Версавелд» (Англия), «Ритм-05», ЛМ40Ц4701 (Россия).
Большой компактностью обладают ПР, работающие в комбинированной системе координат типа «Контур», «Колер» СМ40 Ф2.80.01, УМ160 Ф2.80.01, УМ 160 Ф2.80.01 (Россия), «Гларфа» (Норвегия), «Асса» (Швеция), «Кука» (ФРГ), «Пума» (США).
Табл.1 Кинематическая структура ПР
| Структурная кинематическая схема | Система координат | Модель ПР (страна) |
| Плоская прямоугольная | РО/1(Россия); «Аутохэнд» АН-60-3 (Япония) СМ 80Ц 2Г.01; СМ 80Ц48.01; ТРТ – 250 (Россия); М63 – ОП (ЧСФР); «Пирин» 120; 130; 150 (Болг.) |
| Прямоугольная пространственная | «Аутохэнд» АН-40/40-2 (Япония) |
| Полярная цилиндрическая | «ТойдлБ.Б.СУ» (Япония); КМ10Ц42.31 (Россия); М-04 (ЧСФР); «Мотбэк ИРЦ-30» (Япония); УМ-1; СМ УОЦ40.11 (Россия); «Версатран» США. КМ1, 25Ц42.01; КМ10Ц 42.05; ПР-10 (Россия); РИМП 401 (Польша); «Аутохэнд» (Япония). |
| Полярная цилиндрическая | «Кауфельд» (Швеция), Универсал-5 (Россия) «Пирин» - тип А (Польша). |
| Полярная сферическая | «Универсал-50М» (Россия); РИМП (Польша); «Юнимейт» США; «Кавасаки Юнимейт», «Ротибус РБ»; «Гасман» Яп. |
| Ангулярная (угловая) цилиндрическая | СМ 40 Ф2.80.01 (Россия); МТП-40 (ЧСФР). |
| Ангулярная (угловая) сферическая | «Тралфа» (Швеция); «Асса» (Швеция); «Цинципатти Майлокрон» (США). |
Для привода каждого звена используют отдельный двигатель. При этом двигатели могут быть расположены как на каждом звене, так и все вместе на неподвижном звене. Применяют также смешанный тип расположения двигателей.
Распространенным является работающий в сферической системе координат ПР типа «Юнимейт» (США) и его японский аналог «Кавасаки Юнимейт». Кинематически подобны им отечественные ПР «Универсал-15» и «Универсал-50». Отечественные ПР типа «Универсал-15» имеет четыре степени подвижности, причем его рука в любом положении параллельна своему первоначальному положению.
Широкое распространение получила схема ПР типа «Версатран» (США), позволяющая совершать четыре поступательных и одно вращательное движения. В аналогичной цилиндрической системе координат работают отечественные ПР «Циклон 3.01», ПР-10, «Бриг-10», УМ-1.
В прямоугольной системе координат работают ПР типа «Версавелд» (Англия), «Ритм-05», ЛМ40Ц4701 (Россия).
Большой компактностью обладают ПР, работающие в комбинированной системе координат типа «Контур», «Колер» СМ40 Ф2.80.01, УМ160 Ф2.80.01, УМ 160 Ф2.80.01 (Россия), «Гларфа» (Норвегия), «Асса» (Швеция), «Кука» (ФРГ), «Пума» (США).
Дата добавления: 2019-12-09; просмотров: 721;
Поиск по сайту
Узнать еще
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- I. СТРУКТУРА СОВРЕМЕННЫХ НАЛОГОВЫХ СИСТЕМ.
- Адаптация, изменение или вымирание экосистем.
- Алиментарная недостаточность. Голодание
- Анализ сложных нерегулируемых систем.
- Биологическая продуктивность экосистем.
- Величина, качество и достаточность капитала
- Влияние базирования на точность обработки детали

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
