КИНЕМАТИЧЕСКИЕ СТРУКТУРЫ ПР
Кинематическая структура механизмов ПР определяется видом используемых кинематических пар, а также последовательностью их расположения. Необходимый характер движения РО ПР определяется производственными условиями. При этом различают глобальные, региональные и локальные движения.
Глобальные движения ПР – это движения от объекта к объекту на расстояния, превышающие габаритные размеры самого ПР. Это вызывается необходимостью, например, обслуживать протяженные технологические линии.
Региональные движения выполняются РО ПР в пределах зоны его рабочего пространства (зоны обслуживания).
Локальные перемещения РО соизмеримы с их размерами. К ним относят, главным образом, ориентирующие и транспортные перемещения кисти и губок захватного устройства.
В зависимости от видов использования кинематических пар в структуре ПР обеспечиваются вращательные, поступательные и комбинированные группы движений. Комбинации дают около 60 кинематических структур ПР, однако в действительности их гораздо больше, т.к. зависят не только от числа кинематических пар, но и от последовательности их расположения. Это позволяет создавать манипуляторы ПР с необходимыми рабочими зонами обслуживания, работающими в данной системе координат.
При определении системы координат, в которой работает ПР, принимают во внимание перемещение им РО.
Рабочая зона ПР с прямоугольной системой координат представляет собой параллелепипед. Недостатком таких ПР является чрезмерное увеличение габаритных размеров и времени выполнения программы, преимуществом – высокая точность позиционирования.
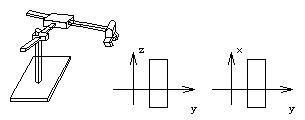
Рабочая зона в цилиндрической системе координат представляет собой цилиндр или цилиндрический сегмент.
Недостатком таких роботов является затрудненное обслуживание при небольших высотах перемещения руки.
Рабочая зона ПР со сферической системой координат представляет собой сферических сегмент. Преимуществом таких роботов является меньшая занимаемость производственных площадей, недостатком – меньшая точность позиционирования.
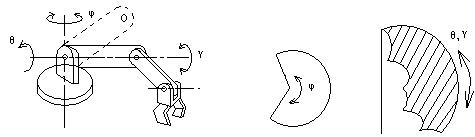
У манипуляторов может быть только угловое перемещение, при этом его рабочая зона может иметь форму сплошного или частичного сферического пространства. Эти манипуляторы называют шарнирными. СУ таких манипуляторов довольно сложна.
Наибольшее распространение (70%) получили ПР движение в которых осуществляется в цилиндрической системе координат, наименьшее (~5%) – в прямоугольной. Однако если необходима высокая точность перемещения РО вдоль значительной части его траектории (например, для измерительных ПР), предпочтение отдается прямоугольной системе.
В этом случае программирование осуществляется более простыми методами.
Есть ПР, работающие в более сложных комбинированных системах координат. Система координат в итоге определяет вид компоновочной схемы и форму рабочей зоны.
Дата добавления: 2019-12-09; просмотров: 779;
Поиск по сайту
Узнать еще
- III. Механизм действия ионизирующих излучений на биологические структуры
- Актуальность и значимость создания доступного объекта социальной инфраструктуры.
- Алгебраические структуры и морфизмы.
- Алгебраические структуры на целых числах.
- Алгоритмы линейной структуры и их программирование
- Анализ ассортимента и структуры продукции
- Анализ динамики и структуры финансовых результатов
- Анализ динамики состава и структуры имущества предприятия (активов) и капитала (пассивов)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
