Основные положения метода переменных состояния
Рассмотрим основные положения метода переменных состояния и его применение для анализа САУ. С математической точки зрения это предполагает использование методов матричного исчисления и векторного анализа. Подход, основанный на понятии переменных состояния системы, особенно удобен для описания многосвязных или нестационарных линейных систем, а также нелинейных систем, исследование которых с помощью методов, базирующихся на использовании передаточных функций и частотных характеристик САУ, часто бывает затруднительным. Использование математического аппарата теории матриц и матричных уравнений позволяет получить основные зависимости в компактном виде, удобном для исследования систем на ЦВМ.
Основное положение метода переменных состояния заключается в следующем. Для полного математического описания динамической системы  -го порядка необходимо ввести в рассмотрение независимых переменных состояния системы
-го порядка необходимо ввести в рассмотрение независимых переменных состояния системы  . Эти переменные должны быть выбраны так, чтобы, зная начальное состояние системы
. Эти переменные должны быть выбраны так, чтобы, зная начальное состояние системы  в момент t = t0,можно было бы при известных на интервале t0 ≤ t ≤ t1входных воздействиях
в момент t = t0,можно было бы при известных на интервале t0 ≤ t ≤ t1входных воздействиях  , определить состояние
, определить состояние  в момент времени
в момент времени  .
.
При описании системы в пространстве состояния целесообразно разделить все сигналы, характеризующие поведение системы, на три группы:
1) входные сигналы или входные воздействия , приложенные к исследуемой системе со стороны других систем,  ;
;
2) выходные сигналы  , характеризующие реакцию системы на указанные входные воздействия,
, характеризующие реакцию системы на указанные входные воздействия,  ;
;
3) промежуточные переменные , характеризующие внутреннее состояние системы,  .
.
Для удобства описания каждую группу переменных можно представить в виде вектора (матрицы-столбца):
Xвх(t) =  – вектор входных воздействий;
– вектор входных воздействий;
Xвых(t)=  – вектор выходных переменных системы;
– вектор выходных переменных системы;
X(t) =  – вектор переменных состояния системы.
– вектор переменных состояния системы.
Приведенная классификация сигналов в системе является в определенной степени условной, так, некоторые переменные состояния могут совпадать с выходными сигналами , но в общем случае между ними существует следующая зависимость:
 (6.1)
(6.1)
В пространстве состояния,осями координат которого являются переменные состояния, каждому моменту времени соответствует вектор X(t). Величина и положение этого вектора с течением времени изменяются, в результате чего конец вектора X(t) описывает кривую, называемую траекторией движения системы в пространстве состояний.
Динамика линейной стационарной САУ -го порядка может быть описана системой линейных дифференциальных уравнений:
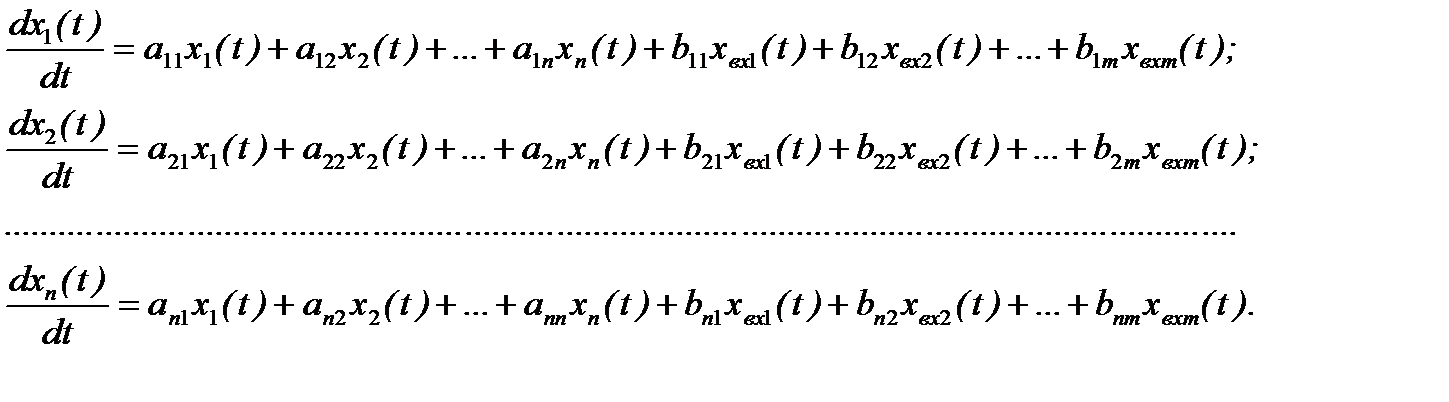 (6.2)
(6.2)
Систему уравнений (6.2) можно записать в виде следующего матричного (векторного) дифференциального уравнения:
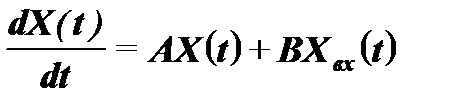 , (6.3)
, (6.3)
где А  – матрица системы (квадратная матрица размером
– матрица системы (квадратная матрица размером  );
);
B  – матрица управленияразмером
– матрица управленияразмером  .
.
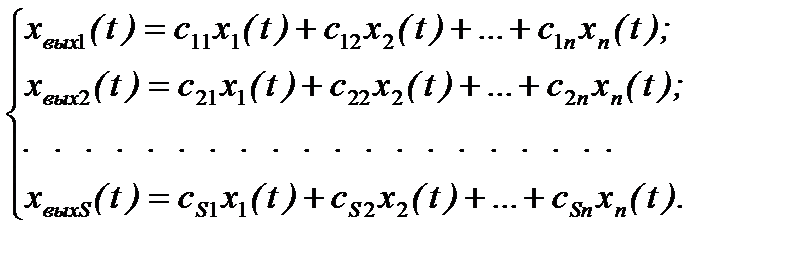
В матричной форме система уравнений (6.1) примет вид:
 , (6.4)
, (6.4)
где С  – матрица наблюдения размером
– матрица наблюдения размером  .
.

|
|
|

|

|

|

|

|
| Рис. 6.1. Структурная схема САУ в векторной форме |
Уравнения (6.3) и (6.4) называют уравнениями состояния системы.
Элементы матрицы системы Аопределяются структурной схемой системы и значениями ее параметров. Матрица управления В характеризует влияние входных сигналов на переменные состояния, а матрица наблюдения С определяет связь выходных сигналов системы с вектором состояния. Обычно не все составляющие вектора состояния являются наблюдаемыми сигналами, т. е. они не могут быть измерены с помощью каких-либо датчиков, в то время как выходные сигналы всегда наблюдаемы.
На рис. 6.1 показана структурная схема системы, соответствующая векторным уравнениям (6.3) и (6.4); двойные линии на рисунке характеризуют векторный характер сигналов.
Согласно определению понятия состояния системы, в любой момент времени
t > t0 состояние системы является функцией начального состояния X(t0) и вектора входа Xвх(t0 , t), т.е.
X(t) = F[X(t0),Xвх(t0 , t)]. (6.5)
Вектор выхода в момент t также однозначно связан с векторами X(t0) и Xвх(t0 , t):
Xвых(t) = R[X(t0),Xвх(t0 , t)]. (6.6)
Приведенные векторные дифференциальные уравнения описывают линейные стационарные САУ. В нестационарных системах элементы матрицы в уравнениях (6.3) и (6.4) являются функциями времени, и векторные дифференциальные уравнения принимают вид:
 ; (6.7)
; (6.7)
 . (6.8)
. (6.8)
Дата добавления: 2017-09-01; просмотров: 1731;
Поиск по сайту
Узнать еще
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cущность организации и ее основные признаки
- I. Достижение состояния покоя и расслабления
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- I. ОСНОВНЫЕ ПОЛОЖЕНИЯ
- I. Политический режим: понятие, сущность и основные типы.
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- I.1.4 ИДЕАЛЬНЫЙ ГАЗ. ГАЗОВЫЕ ЗАКОНЫ. УРАВНЕНИЕ СОСТОЯНИЯ ИДЕАЛЬНОГО ГАЗА

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
