Кинематика самонаведения. Структуры ССН
Как уже говорилось, для самонаведения характерно применение двухточечных методов наведения, когда кинематические связи накладываются на взаимное движение двух точек: цели и ЛА. Движение цели является независимым, следовательно, наложение кинематической связи обусловливает траекторию ЛА. Кинематическая связь осуществляется системой управления, определяющей движение ЛА. Двухточечное наведение строится на основе информации о положении цели относительно ЛА, получаемой самим ЛА. При самонаведении различными методами координатор должен извлекать информацию о направлении линии визирования цели, т.е. угловые координаты цели.
Пространственное движение ЛА можно полностью определить, если рассматривать проекции траектории на взаимно перпендикулярные плоскости. Поскольку кинематические уравнения в обеих плоскостях имеют одинаковый вид, можно ограничиться рассмотрением плоского движения в одной из плоскостей. При составлении структурных схем будут использованы геометрические соотношения в горизонтальной плоскости, которые иллюстрируются рисунком 7.3.
На рисунке использованы следующие основные обозначения:
 - ось не вращающейся земной системы координат, центр которой совмещен со снарядом;
- ось не вращающейся земной системы координат, центр которой совмещен со снарядом;
 и
и  - вектор скорости и ось снаряда;
- вектор скорости и ось снаряда;
 - равносигнальное направление угломера;
- равносигнальное направление угломера;
 - линия визирования цели (вектор снаряд - цель).
- линия визирования цели (вектор снаряд - цель).
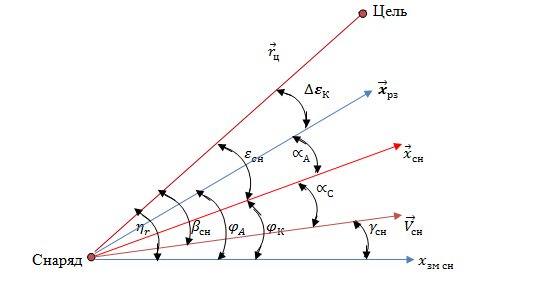
Рисунок 7.3 – Геометрические соотношения в горизонтальной плоскости
Головки самонаведения для малоподвижных целей.Способ самонаведения определяется видом кинематической связи, накладываемой на движение ЛА. Если кинематическая связь осуществляется поддержанием заданного (чаще всего равного
нулю) угла между линией визирования и строительной осью ЛА, то имеем прямое самонаведение (рисунок 7.4,а). Антенна здесь неподвижна относительно корпуса ракеты (  ). Уравнение кинематической связи имеет вид
). Уравнение кинематической связи имеет вид
 . (7.4)
. (7.4)
Метод прямого наведения имеет недостатки, связанные с кривизной кинематической траектории. Об этом говорилось ранее при обсуждении методов наведения. На этапе сближения ЛА с целью кинематическая траектория имеет колебательный спиралевидный характер. Протяженность траектории больше, чем у кривой погони. Используется при наведении только на неподвижные цели.
Именно поэтому для поражения неподвижных и малоподвижных целей применяют наведение по кривой погони, при котором на цель направляют вектор скорости снаряда. Для реализации этого метода следует учитывать углы атаки и скольжения, которые могут быть измерены во время полета с помощью флюгерных датчиков (ДФ - датчик флюгера на рисунке 7.4,б). Сигнал с флюгерного датчика суммируется с сигналом радиовизира цели (антенна радиовизира неподвижно закреплена на корпусе снаряда). Флюгер может быть свободно вращающейся пластиной, установленной вдоль воздушного потока. Данные об угле снимаются с помощью датчика потенциометра, движок которого связан механически с поворотной осью флюгера.
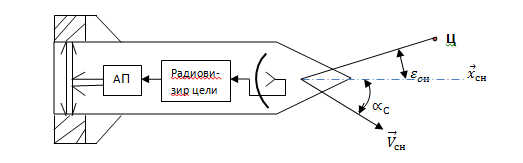
а) аппаратура прямого самонаведения с разомкнутым радиозвеном
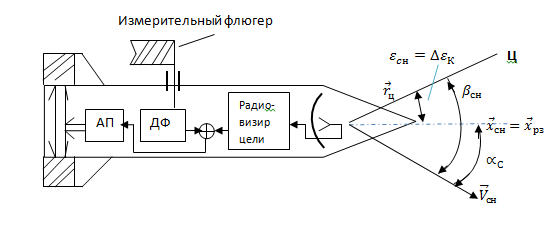
б) аппаратура флюгерного СН
Рисунок 7.4 – Примеры головок самонаведения
Для получения точных показаний флюгер должен быть вынесен в область невозмущенного потока, т.е. укреплен на штанге впереди носовой части снаряда. Это мешает работе головки СН. Поэтому вместо флюгера в качестве датчиков углов скольжения и атаки используют акселерометры.
Уравнение кинематической связи для случая головки самонаведения с измерительным флюгером имеет вид
 (7.5)
(7.5)
Недостатком системы наведения с измерительным флюгером является то, что геометрическая ось антенны визира оказывается отклоненной от направления на цель (в горизонтальной плоскости на величину угла скольжения), что требует расширения
диаграммы направленности антенны. При этом уменьшается угловая чувствительность и коэффициент усиления антенны, а, следовательно, и максимальная дальность действия.
От этого недостатка свободна система наведения с силовым флюгером. При этом антенна визира закрепляется на подвижной платформе, ось которой ориентируется по вектору скорости снаряда (рисунок 7.5).
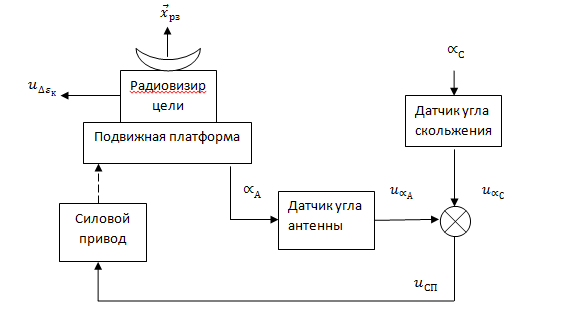
Рисунок 7.5 – Функциональная схема головки СН с силовым флюгером (канал курса)
Ориентация осуществляется с помощью замкнутой системы автоматического регулирования. Датчик угла скольжения связан с флюгером, который всегда поворачивается вдоль вектора . Поэтому датчик угла скольжения выдает приборный аналог  угла скольжения
угла скольжения  . Датчик угла антенны измеряет угол поворота
. Датчик угла антенны измеряет угол поворота  антенной платформы относительно корпуса снаряда. Сигнал
антенной платформы относительно корпуса снаряда. Сигнал  подается на силовой привод, который разворачивает антенную платформу до тех пор, пока угол не станет равным углу (с обратным знаком), т.е. пока ось антенны не совпадет вектором скорости снаряда. В этом случае
подается на силовой привод, который разворачивает антенную платформу до тех пор, пока угол не станет равным углу (с обратным знаком), т.е. пока ось антенны не совпадет вектором скорости снаряда. В этом случае  .
.
Структурная схема головки СН с силовым флюгером изображена на рисунке 7.6.
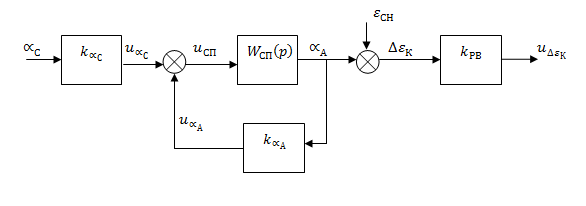
Рисунок 7.6 – Структурная схема головки СН с силовым флюгером
Датчики углов и радиовизир цели на этой схеме считаются безынерционными. Радиовизир цели измеряет угол  .
.
Таким образом, осуществляется измерение угла  между вектором скорости и направлением на цель и вырабатывается сигнал рассогласования при наведении по методу кривой погони. Недостатком этой системы по сравнению с системой с измерительным флюгером является ее сложность.
между вектором скорости и направлением на цель и вырабатывается сигнал рассогласования при наведении по методу кривой погони. Недостатком этой системы по сравнению с системой с измерительным флюгером является ее сложность.
Головки самонаведения для быстродвижущихся целей.Для наведения на быстродвижущиеся цели применяют метод пропорционального сближения. Задачей системы СН является получение сигнала рассогласования  , пропорционального угловой скорости вращения линии снаряд-цель , т.е. величине
, пропорционального угловой скорости вращения линии снаряд-цель , т.е. величине  (рисунок 7.3):
(рисунок 7.3):  . При этом углы между осью снаряда (или вектором скорости) и направлением на цель могут достигать больших значений. Здесь практически уже нельзя использовать рассмотренные ранее визиры – с неподвижной относительно корпуса антенной и с антенной, ориентируемой по вектору скорости снаряда, поскольку равносигнальное направление должно быть направлено на цель.
. При этом углы между осью снаряда (или вектором скорости) и направлением на цель могут достигать больших значений. Здесь практически уже нельзя использовать рассмотренные ранее визиры – с неподвижной относительно корпуса антенной и с антенной, ориентируемой по вектору скорости снаряда, поскольку равносигнальное направление должно быть направлено на цель.
В простейшем случае здесь применяются следящие угломеры, установленные на корпусе снаряда. Структурная схема головки СН с автоследящей антенной изображена на рисунке 7.7. В данной системе применяется силовой привод без жесткой обратной связи, его передаточная функция содержит интегрирующее звено. Поэтому система слежения за целью является астатической. Ошибка слежения такой системы в стационарном режиме пропорциональна скорости изменения входной величины  и при
и при  в стационарном режиме на выходе радиовизира будет напряжение
в стационарном режиме на выходе радиовизира будет напряжение
 , (7.6)
, (7.6)
где  - коэффициент пропорциональности, зависящий от передаточной функции силового привода
- коэффициент пропорциональности, зависящий от передаточной функции силового привода  и коэффициента передачи радиовизира
и коэффициента передачи радиовизира  .
.
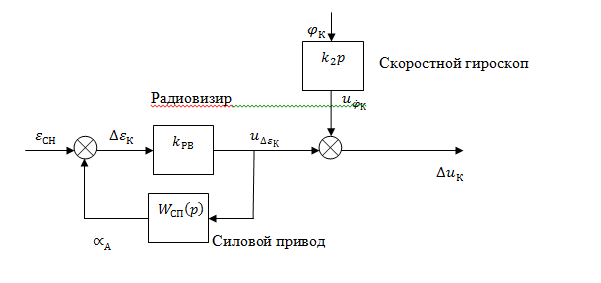
Рисунок 7.7 – Структурная схема головки СН с автоследящей антенной
Для получения сигнала рассогласования  , пропорционального угловой скорости вращения линии снаряд-цель, к сигналу с выхода радиовизира следует добавить сигнал с выхода скоростного гироскопа, пропорциональный производной курсового угла
, пропорционального угловой скорости вращения линии снаряд-цель, к сигналу с выхода радиовизира следует добавить сигнал с выхода скоростного гироскопа, пропорциональный производной курсового угла  (рисунок 7.7), т.е.
(рисунок 7.7), т.е.
 . (7.7)
. (7.7)
Скоростной гироскоп является дифференцирующим звеном. Если  из (7.6) и (7.7) получаем
из (7.6) и (7.7) получаем
 (7.8)
(7.8)
Рассмотренная головка СН с автоследящей антенной имеет два существенных недостатка. Первый связан с тем, что условие точно выполнить не удается, следовательно, соотношение (7.8) реализуется лишь приблизительно. Это снижает точность управления и затрудняет обеспечение устойчивости контура СН. Второй недостаток связан с тем, что самонаводящийся снаряд при полете совершает угловые колебания. Эти колебания приводят к соответствующим колебаниям угла  (рисунок 7.7), а, следовательно, к снижению точности определения угловой скорости вращения линии визирования цели. Для устранения влияния этих колебаний применяют специальные системы стабилизации положения антенны с автономными измерителями угловых колебаний снаряда (скоростными или позиционными гироскопами).
(рисунок 7.7), а, следовательно, к снижению точности определения угловой скорости вращения линии визирования цели. Для устранения влияния этих колебаний применяют специальные системы стабилизации положения антенны с автономными измерителями угловых колебаний снаряда (скоростными или позиционными гироскопами).
Оба недостатка могут быть существенно ослаблены при использовании антенны со следящим гироприводом. В этом случае антенна жестко связана с главной осью позиционного гироскопа  . При отклонении оси антенны от направления на цель на угол
. При отклонении оси антенны от направления на цель на угол  радиовизир цели вырабатывает соответствующий сигнал ошибки, который подается на моментный электродвигатель, создающий вокруг оси гироскопа
радиовизир цели вырабатывает соответствующий сигнал ошибки, который подается на моментный электродвигатель, создающий вокруг оси гироскопа  момент
момент  , равный
, равный
 Здесь
Здесь  - передаточная функция электродвигателя от управляющего напряжения на его входе до создаваемого им момента. Под влиянием приложенного момента ось гироскопа прецессирует таким образом, что угол уменьшается, причем угловая скорость вращения этой оси прямо пропорциональна приложенному моменту, т.е.
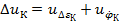
- передаточная функция электродвигателя от управляющего напряжения на его входе до создаваемого им момента. Под влиянием приложенного момента ось гироскопа прецессирует таким образом, что угол уменьшается, причем угловая скорость вращения этой оси прямо пропорциональна приложенному моменту, т.е.  . Структурная схема канала курса головки СН со следящим гироприводом показана на рисунке 7.8.
. Структурная схема канала курса головки СН со следящим гироприводом показана на рисунке 7.8.
Рисунок 7.8 – Структурная схема головки СН со следящим гироприводом
Так как в структурной схеме контура содержится интегрирующее звено, то напряжение оказывается в установившемся режиме пропорциональным скорости изменения входной величины (в нашем случае – угловой скорости вращения линии визирования цели ) и, следовательно может использоваться в качестве сигнала рассогласования при наведении по методу пропорционального сближения (  ).
).
К сожалению, когда гироскоп сочленяется с антенной системой, имеющей значительные габариты и вес, свойства головки СН со следящим гироприводом существенно ухудшаются. Поэтому при небольших габаритах стабилизируемой части антенно-фидерной системы применяется головка СН со следящим гироприводом, а при больших габаритах может оказаться целесообразным применение головки СН с автоследящей антенной и специальные меры для «развязки» внутреннего контура головки СН от угловых колебаний снаряда.
Наряду со следящим угломером в структурную схему управления в зависимости от назначения снаряда могут входить: блок автономного поиска и захвата цели, блок селекции целей по скорости, блок программного управления антенной при специальных маневрах снаряда, блок выключения управления и подготовки радиовзрывателя к действию и т.п.
Любой летательный аппарат с радиоголовкой самонаведения, действующий в атмосфере, содержит радиопрозрачный обтекатель, который защищает чувствительные элементы (антенну и т.п.) от воздействия внешней среды и обеспечивает необходимую аэродинамическую форму корпуса ЛА, но в то же время вносит ошибки в измерения углов координатором. При выборе материала обтекателя учитывают его прочностные характеристики и стойкость к воздействию температуры. Подходящими диэлектрическими материалами считают стекло, пластики и стекловолокно, причем применяют как одно-, так и многослойные материалы.
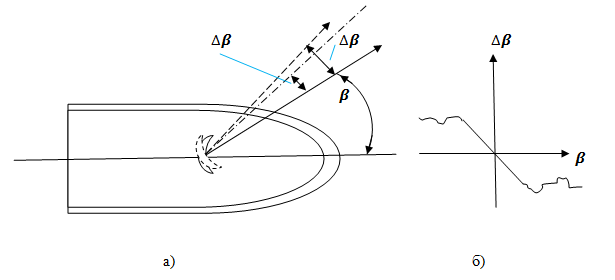
Рисунок 7.9 – Обтекатель а) и кривая изменения направления излучения б)
На рисунке показана форма обтекателя и примерное расположение в нем антенны. Из рисунка видно, что при различной ориентации антенны относительно строительной оси ЛА (и, следовательно, относительно оси обтекателя) электромагнитный луч будет искажаться по-разному. Это происходит во-первых, из-за изменения коэффициента отражения от обтекателя при разных углах падения волны и, во-вторых, из-за различной длины пути волны в толще диэлектрика, что создает различное затухание, а главным образом, различные фазовые сдвиги, и, как следствие, искажает форму ДН и смещает направление максимума. Кривая изменения направления излучения в зависимости от угла поворота антенны  (рисунок 7.9,б) должна определяться экспериментально. По ней представляется возможным определить ошибку в угловой скорости. Анализ ошибки показывает, что целесообразно применять полусферические обтекатели с расположением антенны в центре, так как тогда
(рисунок 7.9,б) должна определяться экспериментально. По ней представляется возможным определить ошибку в угловой скорости. Анализ ошибки показывает, что целесообразно применять полусферические обтекатели с расположением антенны в центре, так как тогда  , однако этого не позволяют требования аэродинамики. Нахождение разумного компромисса составляет содержание работы по проектированию обтекателя как элемента, принадлежащего одновременно ГСН и корпусу ЛА.
, однако этого не позволяют требования аэродинамики. Нахождение разумного компромисса составляет содержание работы по проектированию обтекателя как элемента, принадлежащего одновременно ГСН и корпусу ЛА.
Дата добавления: 2017-09-01; просмотров: 4163;
Поиск по сайту
Узнать еще
- ID_структуры . ID_поля
- III.1. КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
- Алгоритм расчета структуры изображения с использованием функции размытия линии.
- Альтернативные структуры ДНК
- Анализ ассортимента и структуры продукции
- Анализ ассортимента и структуры продукции
- Анализ динамики, состава и структуры источников формирования капитала предприятия
- Анализ состава структуры и динамики внеоборотных активов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
