Виды систем самонаведения
Самонаведением называется наведение аппарата на цель (пункт назначения)
на основе приема энергии, излучаемой или отражаемой целью. Можно дать и еще одно определение: самонаведение – способ РУ, при котором команда управления формируется на снаряде на основе информации (о взаимном положении и движении снаряда и цели), которая содержится в сигнале, поступающем на вход бортового ПРМ. Пункт управления (ПУ) играет вспомогательную роль: обеспечивает старт снаряда, выбор цели, контроль работоспособности, иногда содержит источник энергии, облучающий цель (полуактивные системы СН). С одного стартового комплекса можно запускать одновременно несколько самонаводящихся ЛА.
Рост ошибок наведения с увеличением дальности полета ЛА – одна из причин, требующих перехода к системам самонаведения (ССН). В ССН по мере приближения к цели мы получаем все большую точность. Такие системы применяются при управлении пилотируемых ЛА на этапе ближнего наведения, для зенитных ракет, ракет «воздух-воздух», «воздух-поверхность» малой и средней дальности действия. Системы СН самолетов могут работать в трех режимах: автоматическом, полуавтоматическом (директорном) и ручном. Системы СН ракет работают только в автоматическом режиме.
По виду используемой мощности системы СН делятся на:
1) радиолокационные;
2) оптические;
3) телевизионные;
4) тепловые.
Оптические системы используют видимые лучи (0,76 ÷ 0,4 микрона). Их достоинство – высокая точность и разрешающая способность. Недостаток – большая зависимость от метеорологических условий по сравнению с радиотехническими ССН.
Световые системы самонаведения основаны на том, что большинство воздушных целей отражает солнечный или лунный свет значительно сильнее, чем окружающий их фон. Это позволяет выделить цель на данном фоне и навести на нее ракету с помощью ГСН, осуществляющей прием сигнала в диапазоне видимой части спектра электромагнитных волн. Достоинства данной системы определяется возможностью применения пассивного способа самонаведения. Ее существенный недостаток — сильная зависимость дальности действия от метеорологических условий. При хороших метеорологических условиях световое самонаведение невозможно также в направлениях, с которых в поле зрения угломера системы попадает мешающая энергия Солнца или Луны.
В тепловых инфракрасных (ИК) системах по сравнению с радиотехническими ССН:
- проще аппаратура;
- выше разрешающая способность и точность -  ,
,  .
.
Минусы:
-дальность действия зависит от метеоусловий (при плохих - может быть в несколько раз меньше 20-30 км);
- дальность зависит от направления излучения целью ИК-энергии, т.е. от угла атаки.
Тепловые головки работают в диапазоне длин волн 1÷ 400 микрон [мк], наиболее широко используется диапазон 5 ÷ 40 мк. В этой области цели наиболее интенсивно излучают, а разработчики научились изготавливать хорошие датчики.
Возможно также применение комбинированных систем самонаведения, использующих, например, комбинацию радиотехнических и тепловых координаторов.
Различие используемых диапазонов электромагнитных волн и методов обработки принимаемых сигналов определяет большое разнообразие принципов построения ГСН, но в их составе можно выделить следующие функциональные узлы: обтекатель; фокусирующую или антенную систему; чувствительный элемент или приемник энергии; приемное устройство, осуществляющее усиление и оптимальную первичную фильтрацию сигнала; анализатор структуры принятого сигнала по амплитудному и спектральному составу; обнаружитель цели; устройства автоматического сопровождения цели по дальности или скорости сближения с нею; систему автоматического сопровождения цели по углам и привод антенны; вычислительные и логические устройства, принимающие решение о захвате цели, обеспечивающие помехозащищенность и осуществляющие обмен информацией с системой наведения ракеты; антенну и приемное устройство опорного (хвостового) канала в полуактивных радиолокационных ГСН или приемник радиокомандной линии при комбинированном наведении ракеты; передающее устройство в активных головках самонаведения. В систему СН кроме того включены устройства стабилизации и управления рулями.
В зависимости от места расположения источника энергии, создающего сигналы, поступающие от цели, ССН могут быть активными (рис.7.1,а), полуактивными (рис.7.1,б), пассивными (рис. 7.1,в).
При активном и пассивном методе вся аппаратура находится в передней части снаряда, при полуактивном – часть аппаратуры в хвостовой части. Еще раз повторим, что при СН информация об отклонении ЛА от траектории наведения получается с помощью только бортовой аппаратуры, и здесь же на борту информация преобразуется в управляющие воздействия, изменяющие направления полета ЛА.
Очевидно, активные системы самонаведения являются в аппаратурном отношении
автономными. Однако в информационном отношении они не автономны и в этом заключается их принципиальное отличие от автономных систем управления.
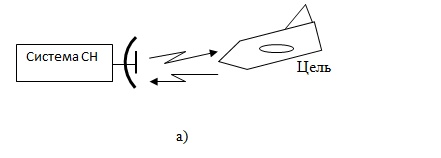
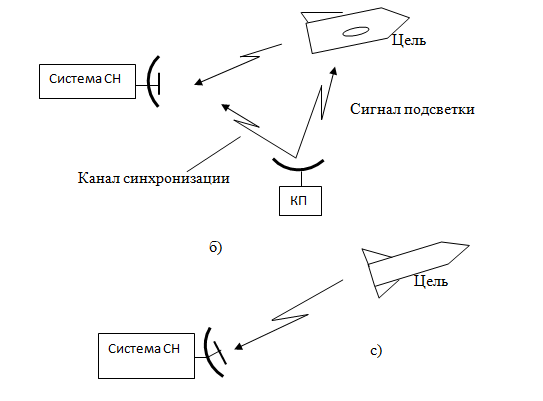
Рисунок 7.1 - Физика работы систем СН
Действительно, энергия, идущая от цели (пункта назначения), используется в
системах самонаведения для получения в процессе полета информации о положении и характере движения аппарата относительно цели и учета этой информации при образовании команд управления. Благодаря наличию такого информационного канала — канала контроля цели— самонаведение имеет по сравнению с автономным управлением как весьма важное преимущество, так и серьезный недостаток. Преимуществом является возможность наведения аппарата на цели, положение или параметры движения которых априори известны с недостаточной точностью, например на самолеты противника. Недостаток состоит в возможности создания противником эффективных помех, действующих на канал контроля цели.
Этапы управления движением снаряда в ССН:
1) подготовка к СН;
2) отработка начальной ошибки прицеливания;
3) преследование цели;
4) движение после прекращения работы системы СН (работает радиовзрыватель).
На этапе подготовки к режиму СН осуществляется управление стартом снаряда, если самонаведение применяется на всем участке наведения, или вывод управляемого снаряда в зону действия ССН при комбинированном управлении.
Основным преимуществом полуактивных систем по сравнению с активными является то, что мощный первичный источник энергии, облучающий цель находится вне ракеты (обычно на КП) и не гибнет вместе с ней. Вследствие этого бортовая аппаратура более проста, имеет меньшие габариты и вес. Кроме того, в этом случае можно осуществить большую мощность и направленность действия излучения ПРД и обеспечивать благодаря этому большую дальность действия ССН.
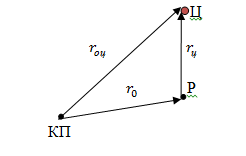
Основным преимуществом активных систем перед полуактивными – полная независимость процесса самонаведения от КП. Здесь ПРД выдает противнику расположение не КП, а лишь ракеты. Наконец, активное самонаведение может оказаться более целесообразным, чем полуактивное, в тех случаях, когда процесс самонаведения должен начинаться не с момента вылета ракеты с КП, а лишь при очень большом удалении ракеты от КП и малой дальности до цели (рис. 7.2)
Пусть, например, ракета с момента вылета из КП и до точки Руправляется посредством телеуправления и должна перейти на самонаведение только в точке Р. Тогда при полуактивном самонаведении облучающий ПРД, расположенный на КП, должен иметь мощность  , определяемую из следующих соотношений.
, определяемую из следующих соотношений.
ПРД КП создает у цели удельную мощность (мощность на единицу поверхности)

Отраженная от цели мощность в точке приема (на ракете) равна
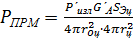 , (7.1)
, (7.1)
где  - эффективная отражающая поверхность цели.
- эффективная отражающая поверхность цели.
Мощности сигналов на входе ПРМ ракеты
 при активном методе
при активном методе
 , (7.2)
, (7.2)
Рисунок 7.2
где  - коэффициент направленного действия антенны на ракете,
- коэффициент направленного действия антенны на ракете,  - коэффициент направленного действия антенны КП (
- коэффициент направленного действия антенны КП (  ).
).
Если положить, что приемники энергии на ракете в обоих случаях одинаковы, т.е. требуют подведения к ним одинаковой удельной мощности, то
 (7.3)
(7.3)
на КП антенна может иметь большие размеры, чем на ракете. Для сантиметрового диапазона радиоволн можно получить  . Если
. Если  , то выигрыша нет, так как антенна КП более строго направлена (
, то выигрыша нет, так как антенна КП более строго направлена (  ). Активная система имеет выигрыш в энергетическом соотношении при
). Активная система имеет выигрыш в энергетическом соотношении при  а точнее при
а точнее при  .
.
Понятнее простые пояснения. Пассивный метод: если цель создает поле излучения, которое на необходимом для осуществления самонаведения расстоянии обладает достаточной мощностью, то установка самонаведения состоит лишь из направленного приемника, то есть устройства, которое реагирует на поле и позволяет определить направление вектора поля или направление излучения. Сюда же можно отнести наведение на источники света, источники теплового излучения или шумов, а также на радиопередатчики всех типов. Задача решается совсем просто, если источник энергии служит специально целям наведения. В этом случае связь с целью или объектом для определения их координат может быть осуществлена наиболее эффективно путем выбора соответствующей частоты, модуляции, диаграммы излучения и т. д. Для самонаводящихся боевых средств поражения эта возможность отпадает, и нужно искать пути использования энергии, излучаемой самой целью (противником). Примеры: шум винтов кораблей, тепловое излучение промышленных сооружений, радиопередатчики противника и т. д.
Активный метод: если цель не создает поля, которое можно было бы использовать, то ее можно облучать с управляемого объекта. При этом определение координат цели для самонаведения осуществляется по пеленгу отраженных лучей. Необходимым условием для этого является то, что цель по своим способностям отражения лучей должна резко отличаться от окружающей среды, Применимые при этом виды энергии в принципе являются теми же, что и при пассивном методе.
При использовании стационарных полей также принципиально возможно активное самонаведение, причем вместо отражения лучей будет иметь место возмущение поля, которое поддается измерению для электростатических полей, например, емкостными методами.
Под минимальной дальностью самонаведения понимают  , которая необходима для уменьшения начальной ошибки СН до допустимой величины.
, которая необходима для уменьшения начальной ошибки СН до допустимой величины.
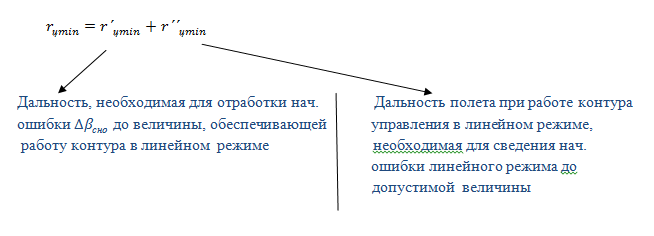
При небольшой начальной ошибке 
 , (7.3)
, (7.3)
где  - максимально возможное поперечное ускорение,
- максимально возможное поперечное ускорение,  - скорость снаряда (ракеты). При
- скорость снаряда (ракеты). При  ,
,  ,
,  , получим = 4 км. Обычно должно быть больше, т.к. необходимо время, чтобы достичь нужное . Для систем СН ракет «воздух-воздух» следует учитывать допустимое сближение самолета с целью в момент пуска ракет.
, получим = 4 км. Обычно должно быть больше, т.к. необходимо время, чтобы достичь нужное . Для систем СН ракет «воздух-воздух» следует учитывать допустимое сближение самолета с целью в момент пуска ракет.
Методы наведения при движении ССН – двухточечные.
Для вычисления параметра рассогласования и выработки команд управления следящие системы головки самонаведения должны непрерывно отслеживать цель. При этом формирование команды управления возможно при сопровождении цели только по угловым координатам. Однако такое сопровождение не обеспечивает селекцию цели по дальности и скорости, а также защиту приемника головки самонаведения от побочной информации и помех.
Для автоматического сопровождения цели по угловым координатам используются равносигнальные методы пеленгации. Угол прихода отраженной от цели волны определяется сравнением сигналов, принятых по двум или более несовпадающим диаграммам направленности. Сравнение может осуществляться одновременно или последовательно.
Наибольшее распространение получили пеленгаторы с мгновенным равносигнальным направлением, в которых используется суммарно-разностный способ определения угла отклонения цели. Появление таких пеленгационных устройств обусловлено в первую очередь необходимостью повышения точности систем автоматического сопровождения цели по направлению. Такие пеленгаторы теоретически не чувствительны к амплитудным флюктуациям отраженного от цели сигнала.
Принцип селекции цели по дальности и скорости зависит от характера излучения, которое может быть импульсным или непрерывным.
При импульсном излучении селекция цели осуществляется, как правило, по дальности с помощью стробирующих импульсов, открывающих приемник головки самонаведения в момент прихода сигналов от цели.
При непрерывном излучении сравнительно просто осуществить селекцию цели по скорости. Для сопровождения цели по скорости используется эффект Доплера. Величина доплеровского смещения частоты сигнала, отраженного от цели, пропорциональна при активном самонаведении относительной скорости сближения ракеты с целью, а при полуактивном самонаведении — радиальной составляющей скорости цели относительно наземного радиолокатора облучения и относительной скорости сближения ракеты с целью. Для выделения доплеровского смещения при полуактивном самонаведении на ракете после захвата цели необходимо произвести сравнение сигналов, принятых радиолокатором облучения и головкой самонаведения. Настроенные фильтры приемника головки самонаведения пропускают в канал изменения угла только те сигналы, которые отразились от цели, движущейся с определенной скоростью относительно ракеты.
Основными тактико-технические характеристиками ГСН являются: дальность захвата цели в свободном пространстве и на фоне естественных помех (подстилающей поверхности, облачного фона); измеряемые координаты, диапазон их возможных изменений; точность автоматического сопровождения, в том числе при подлете к цели; разрешающая способность, или возможность выделения одной цели из состава плотной группы; устойчивость к организованному противодействию противника (помехоустойчивость), характеризуемая вероятностью захвата и точностью сопровождения цели и в конечном счёте вероятностью её поражения; массо-габаритные и энергетические показатели, определяющие использование головки самонаведения на ракете.
Дата добавления: 2017-09-01; просмотров: 5893;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
