Анализ внутренних контуров головок СН
Все рассмотренные выше типы головок самонаведения, кроме головки самонаведения с неподвижно закрепленной на корпусе снаряда антенной, выполняются как следящие САУ. Слежение осуществляется либо за направлением вектора скорости снаряда, либо за направлением на цель. Соответствующие контуры автоматического регулирования являются внутренними к основному, внешнему контуру управления движением снаряда. Упрощенные структурные схемы внутренних контуров головок СН изображены на рисунках 7.6 – 7.8. Проанализируем эти схемы, введя некоторые приближения. Пренебрежем постоянными времени датчиков и радиовизира и учтем лишь постоянную времени электродвигателя. При этом передаточная функция силового привода (электродвигателя с редуктором) от входного напряжения до угла поворота антенны в схемах на рис.7.6,7.7 описывается совокупностью инерционного (апериодического первого порядка) и интегрирующего звеньев
 , (7.9)
, (7.9)
А передаточная функция электродвигателя с редуктором в схеме на рис. 7.8 от  до
до  - инерционным звеном (апериодическим первого порядка)
- инерционным звеном (апериодическим первого порядка)
 . (7.10)
. (7.10)
Можно считать, что структурные схемы внутренних контуров всех головок СН имеют одно и то же строение, а именно каждая из них включает в себя последовательное соединение интегрирующего и инерционного звеньев.
Проанализируем детально внутренний контур головки СН со следящим гироприводом (рисунок 7.8). Остальные контуры анализируются аналогично. Более подробная структурная схема внутреннего контура рассматриваемой головки СН изображена на рисунке 7.10. На рисунке  - коэффициент передачи усилителя постоянного тока и электромашинного усилителя, угол
- коэффициент передачи усилителя постоянного тока и электромашинного усилителя, угол  является ошибкой слежения антенны за целью. Внутренний контур должен обеспечивать малую величину , так как увеличение ошибки слежения приводит к опасности потери цели или к необходимости расширения диаграммы направленности антенны.
является ошибкой слежения антенны за целью. Внутренний контур должен обеспечивать малую величину , так как увеличение ошибки слежения приводит к опасности потери цели или к необходимости расширения диаграммы направленности антенны.
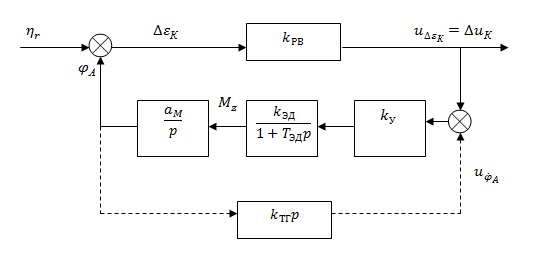
Рисунок 7.10 – Развернутая структурная схема внутреннего контура головки СН
со следящим гироприводом
Для уменьшения динамической ошибки следует повышать общий коэффициент усиления  . Однако при этом переходные процессы в контуре регулирования приобретают сильно выраженный колебательный характер. Для уменьшения колебательности применяют местную гибкую обратную связь с помощью тахогенератора, дающего напряжение
. Однако при этом переходные процессы в контуре регулирования приобретают сильно выраженный колебательный характер. Для уменьшения колебательности применяют местную гибкую обратную связь с помощью тахогенератора, дающего напряжение  , пропорциональное угловой скорости
, пропорциональное угловой скорости  (пунктирная ветвь на рисунке). Тогда передаточная функция всего внутреннего контура от
(пунктирная ветвь на рисунке). Тогда передаточная функция всего внутреннего контура от  до
до  описывается выражением:
описывается выражением:
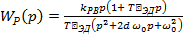 , (7.11)
, (7.11)
где
 ;
;
 ;
;
 .
.
Вместе с тем, при точном измерении головкой СН угловой скорости вращения линии визирования  необходимо, чтобы передаточная функция внутреннего контура описывалась дифференцирующим звеном
необходимо, чтобы передаточная функция внутреннего контура описывалась дифференцирующим звеном
 , (7.12)
, (7.12)
где  - некоторый коэффициент пропорциональности.
- некоторый коэффициент пропорциональности.
При правильно спроектированной головке СН отличие передаточных функций (7.11) и (7.12) проявляется лишь на частотах, лежащих вне полосы пропускания контура управления движением самонаводящегося снаряда  . Это будет выполнено, если частоты среза форсирующего и колебательного звеньев в (7.11) -
. Это будет выполнено, если частоты среза форсирующего и колебательного звеньев в (7.11) -  и
и  будут значительно больше . При этом динамические ошибки при измерении угловой скорости практически на процесс наведения не влияют. Из сравнения (7.11) и (7.12) находим выражение для :
будут значительно больше . При этом динамические ошибки при измерении угловой скорости практически на процесс наведения не влияют. Из сравнения (7.11) и (7.12) находим выражение для :
 . (7.13)
. (7.13)
Полная структурная схема системы самонаведения содержит в своем составе кроме структуры самой головки СН звено Автопилот-Снаряд и кинематическое звено, отражающее связь между координатами цели, углом вектора скорости снаряда и координатами цели относительно координат снаряда, измеряемыми бортовым радиовизиром. Рассмотрением контура управления самонаводящимся снарядом мы займемся в следующем параграфе.
Дата добавления: 2017-09-01; просмотров: 2824;
Поиск по сайту
Узнать еще
- Case-study (анализ конкретных ситуаций, ситуационный анализ)
- HTML заголовок и его виды
- II Расчет и анализ трехфазных цепей
- II. Качественный контроль (социологический анализ).
- III и IV нейроны слухового пути. Третьи и четвертые нейроны слухового проводящего пути. Ядра слухового анализатора. Признаки поражения слухового пути.
- VII. Анализ характера
- І. Анализаторы І сигнальной системы
- ІІ. Анализаторы ІІ сигнальной системы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
