Промышленные роботы
Промышленный робот – это манипулятор автоматического действия, оснащенный системой цифрового программного управления. В нем совмещаются большая гибкость исполнительных органов, обладающих обычной для манипуляторов высокой подвижностью, и легкость переналадки их двигательных функций. Роботы предназначены для различных работ при минимальном участии человека в акте управления. Они являются универсальными автоматами, в состав которых входит три основных функциональных узла:
1. рабочие органы (″руки″);
2. вычислительная машина для управления рабочими органами;
3. устройство сбора информации о среде, сообщающее роботу способность адаптации к ней.
Промышленный робот обладает памятью, имеет специальную систему обучения. Управление группой роботов может осуществляться от одной центральной ЭВМ. Первые модели сложных программируемых роботов были созданы еще в начале 60–х годов американскими фирмами ″UNIMATE″ и ″AMV″.
Первоначально роботы заменяли человека на утомительных и опасных операциях, но в дальнейшем сфера их применения охватила также такие производственные операции, как покраска, сварка, подача исходных материалов и снятие готовой продукции.
Первоначально в основе механизмов, используемых в роботах, лежали сложные и оригинальные кинематические связи, что накладывало трудности на реализацию производственных процессов при переналадке на другие операции.
Затем появились автоматические устройства, обладающие памятью и способные выполнять ряд сложных операций, быстро переналаживаться на другой цикл и не реагировать на изменение внешних условий.
В общем случае рабочий орган должен подобно руке человека перемещать объект в заданную точку пространства и определенным образом ориентировать этот объект. Причем рука робота должна обладать определенной маневренностью, грузоподъемностью, точностью позиционирования и скоростью. ″Кисть″ на конце руки робота состоит из зажимных устройств, способных удерживать детали и узлы. В кисти могут быть один или два набора ″пальцев″ или вакуумных (магнитных) присосок.
К роботу можно подсоединять разные кисти для выполнения различных работ. При этом замена кистей может выполняться автоматически без участия человека. К примеру, кисть с тремя пальцами позволяет захватывать до 80% тех предметов, которые могут удерживаться рукой человека.
В общем случае роботам–манипуляторам в зависимости от их конструкции и назначения придается от двух до шести степеней свободы. Но в некоторых случаях число степеней свободы рабочего органа и самого робота достигает восьми.
Рука робота может вращать кисть и перемещаться по вертикали и по горизонтали. Сама кисть может сжиматься или разжиматься, поворачиваться и наклоняться вперед и в стороны, как кисть человеческой руки.
Перемещение рабочего органа может быть прерывистым (от точки к точке) и плавным. У роботов с плавным перемещением рабочего органа последний (орган) движется, как правило, по контуру в соответствии с определенной задачей. Роботы с прерывистым движением рабочего органа используются преимущественно для прямолинейного перемещения деталей от одной операции к другой. Погрешность установки рабочего органа для такого робота может не превышать нескольких сотых миллиметра.
В качестве привода исполнительных органов робота хорошо зарекомендовали себя электрогидравлические устройства, сочетающие такие качества, как большая выходная мощность при малой инерционности, надежность в работе и возможность электрического управления. В зависимости от типа памяти и исполнительных звеньев система управления может быть цифровой, аналоговой и смешанной. Роботы, имеющие в системе управления микроЭВМ, оснащаются ″телеглазом″.
Роботы повышенной сложности могут быть запрограммированы на повторяющийся останов рабочего органа в 200–3000 точках рабочей зоны, а не в 20 – 30 точках, как у простых роботов.
Чтобы соблюдать правильную траекторию движения руки при повторяющихся рабочих операциях, робот должен обладать памятью: на вращающемся магнитном барабане, на цилиндрических магнитных тонких пленках, на потенциометрах, на металлоокисных полупроводниках, на сдвиговых регистрах.
Наиболее просто роботизации поддаются сборка и сварка узлов с нахлесточными соединениями, свариваемыми контактной сваркой, сложнее – с тавровыми и угловыми соединениями, выполняемыми дуговой сваркой, и еще сложнее – со стыковыми соединениями, выполняемыми дуговой сваркой.
Для перемещения неориентированных в пространстве предметов достаточно трех степеней подвижности, а для полной пространственной ориентации — шести.
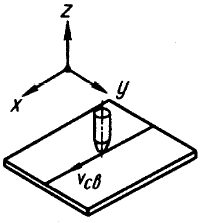
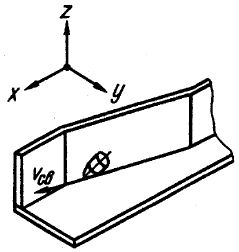
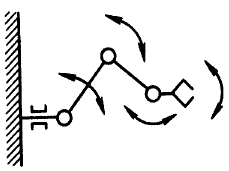
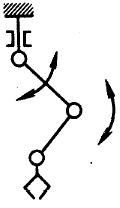
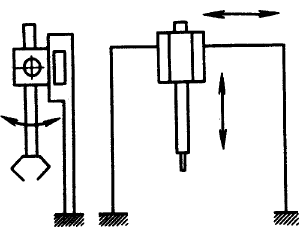
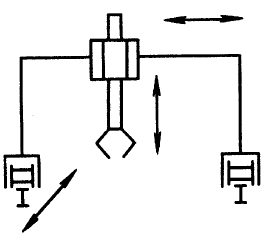
Для выполнения сварных швов дуговой сваркой в общем случае необходимо иметь пять степеней подвижности сварочного инструмента (рисунки 1–4).
а) б)
в)
Рисунок 1 – Строго ориентированные швы
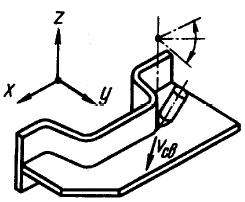
а) б)
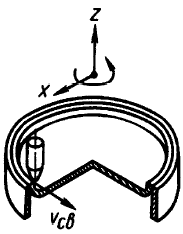
Рисунок 2 – Нестрого ориентированные швы
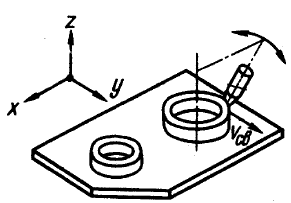
а) б)
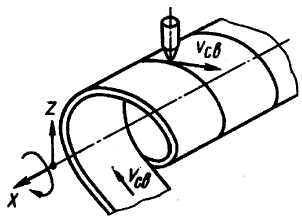
Рисунок 3 – Произвольные швы
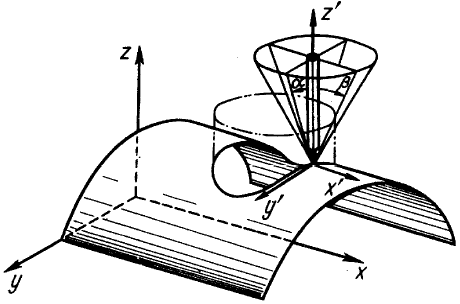
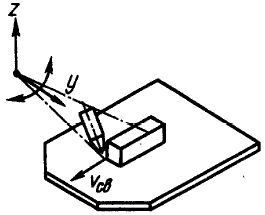
Рисунок 4 – Направление перемещения электрода при дуговой сварке криволинейных пространственных швов
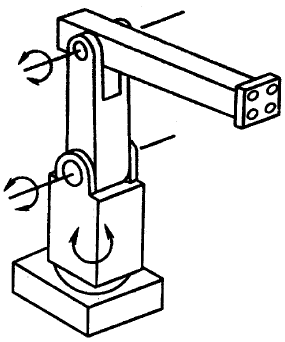
Обычно три степени подвижности обеспечивает базовый механизм робота. А еще две степени добавляет механическое устройство: кисть работа, на которой крепится сварочная головка; клещи для контактной сварки или захват. Базовый механизм робота может быть выполнен в прямоугольной, цилиндрической, сферической и ангулярной (антропоморфной) системах координат (таблица 1).
Таблица 1 – Основные схемы базовых механизмов роботов
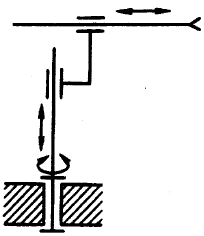
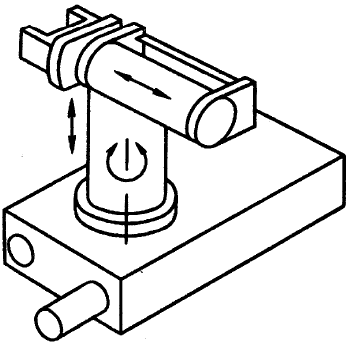
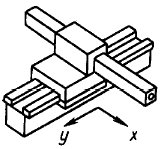
| СИСТЕМА КООРДИНАТ | ПРЯМОУГОЛЬНАЯ | СХЕМА СИСТЕМЫ КООРДИНАТ | КИНЕМАТИЧЕСКАЯ СХЕМА | КОНСТРУКТИВНАЯ СХЕМА |
| 
|
| ||
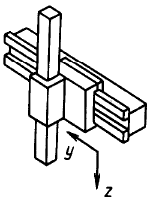
| ЦИЛИНДРИЧЕСКАЯ |
|
|
| |
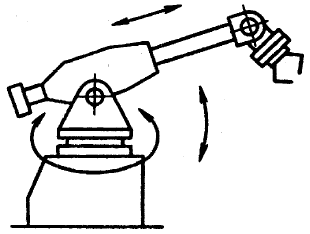
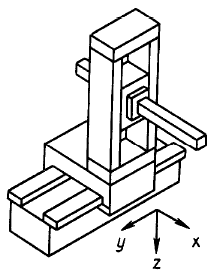
| СФЕРИЧЕСКАЯ | 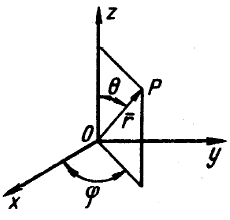
| 
|
| |
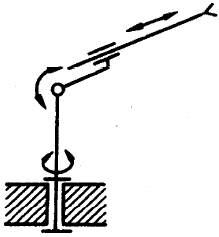
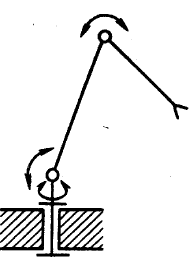
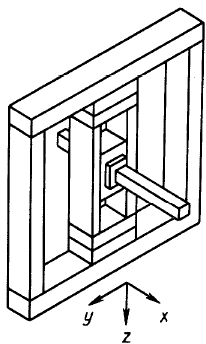
| АНТРОПОМОРФНАЯ | 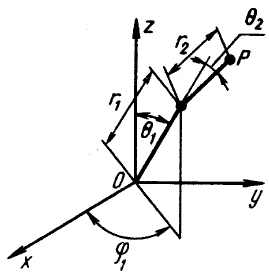
| 
|
|
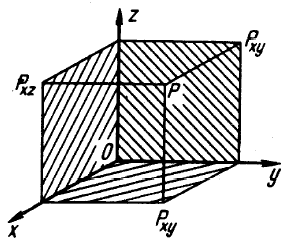
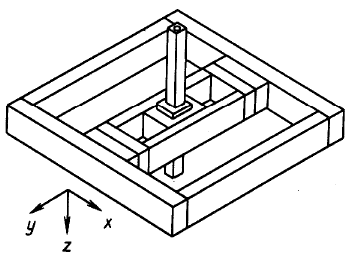
Система координат базового механизма определяет конфигурацию и габариты рабочего пространства робота, в пределах которого возможно управляемое перемещение исполнительного органа робота. Робот с прямоугольной системой координат имеет рабочее пространство в виде прямоугольного параллелепипеда (рисунок 5), размеры которого меньше габаритов самого робота.
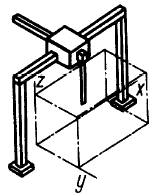
Рисунок 5 – Рабочее пространство робота с прямоугольной системой координат
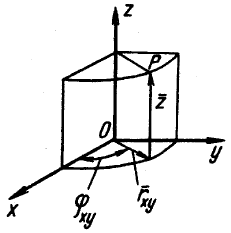
Промышленные роботы с цилиндрической (рисунок 6) и сферической (рисунок 7) системами координат обладают большим объемом рабочего пространства при относительно малой площади основания манипулятора.
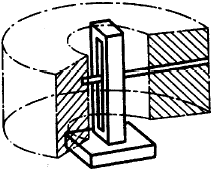
Рисунок 6 – Рабочее пространство робота с цилиндрической системой координат
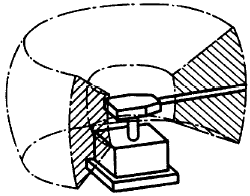
Рисунок 7 – Рабочее пространство робота со сферической системой координат
Еще более компактный робот получается в ангулярной системе координат (рисунок 8).
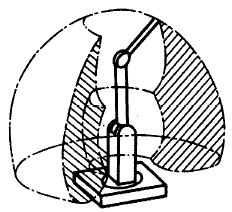
Рисунок 8 – Рабочее пространство робота с ангулярной (антропоморфной) системой координат
Рабочее пространство его определяется размерами рычагов и предельными углами их поворотов, образуя объем, близкий к сфере.
Роботы могут быть установлены неподвижно (рисунок 9).
а) б) в)
Рисунок 9 – Неподвижная установка робота
Или могут располагаться с возможностью перемещения по направляющим, установленным на полу (рисунок 10) и потолке (рисунок 11).

а) б)
Рисунок 10 – Подвижная установка робота по направляющим пола
а) б) в)
Рисунок 11 – Подвижная установка робота по направляющим потолка
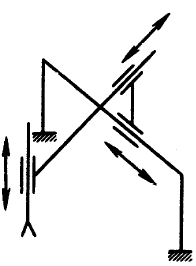
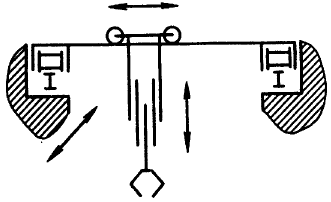
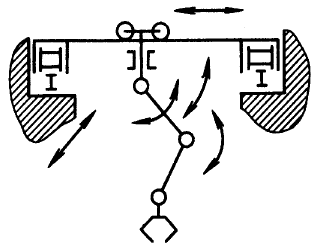
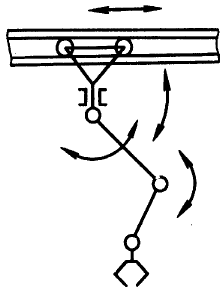
Перспективна компоновка базового механизма роботов из устройств прямолинейного перемещения однокоординатного модуля (рисунок 12).
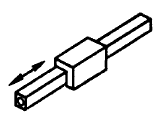
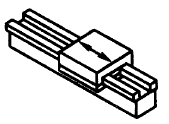
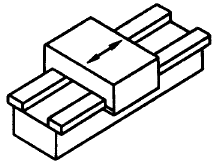
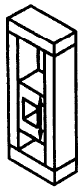
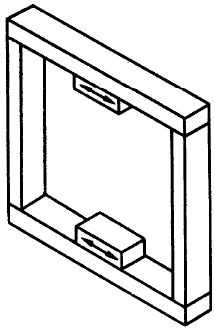
а) б) в) г) д)
Рисунок 12 – Однокоординатный модуль (а) и устройства его прямолинейного перемещения (б–д)
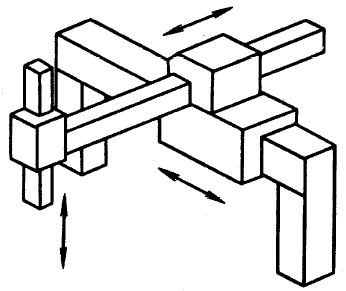
При помощи модулей в зависимости от характера выполняемой работы можно создавать роботы с одной, двумя и тремя степенями подвижности базового механизма, выполненного в прямоугольной системе координат (рисунок 13).
а) б) в)
г) д)
Рисунок 13 – Схемы агрегатирования устройств перемещения
Дата добавления: 2017-06-13; просмотров: 2752;
Поиск по сайту
Узнать еще
- Важнейшие промышленные яды
- МАНИПУЛЯТОРЫ И РОБОТЫ В МЕТАЛЛУРГИИ
- Монополизм в экономике и его последствия. Антимонопольное законодательство. Финансово-промышленные группы
- Образование и сущность финансового капитала. Финансово-промышленные группы. Финансовая олигархия
- Одноэтажные, двухэтажные, многоэтажные и универсальные промышленные здания
- Промышленные газовые турбины для производства электричества
- Промышленные магнитотвердые материалы
- Промышленные магнитотвердые материалы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
