Электропневматические следящие приводы
Привод (рис. 9.44) состоит из пневмоцилиндра ПЦ, датчика ДОС обратной связи по положению, системы управления и управляющего устройства.
В управляющее устройство входят: электромеханический преобразователь ЭМП; преобразователь сопло - заслонка, состоящий из заслонки и двух сопел С1, С2; двух золотниковых усилителей ЗУ1, ЗУ2. Воздух к соплам подается через демпферы Д1 и Д2. В среднее положение заслонка устанавливается пружинами П1, П2. После подачи управляющего сигнала на электромагнит ЭМП заслонка изменяет расстояния между ней и соплами.
Пропорционально величине приближения к соплу смещается один из золотниковых усилителей, соединяя магистраль с одной из камер пневмоцилиндра. При этом противоположная камера ПЦ сообщается с атмосферой через не работающий в это время золотниковый усилитель.
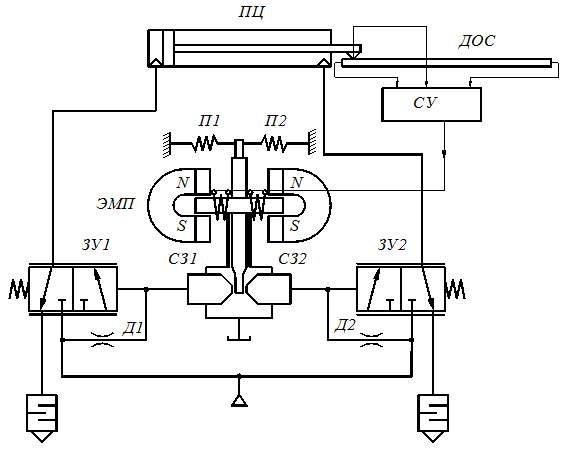
Рис. 9.44
Поршень перемещает рабочий орган до заданной позиции. При равенстве сигналов ДОС и задающего управляющий сигнал становится равным нулю и привод останавливается.
Приводы фирмы ТOKIKO обеспечивают точность позиционирования 1,0 мм при максимальной скорости движения 0,5 м/с.
В электромеханическом следящем приводе механизма выдвижения руки и поворота робота (рис. 9.45) в качестве управляющего устройства применяются ЭМП и усилитель струйная трубка.
Цилиндр имеет диаметр поршня 16 мм и ход 130 мм. Привод работает следующим образом. Входной сигнал от задающего генератора ЗГ через блок управления БУ и усилитель мощности У поступает на обмотки ЭМП, который поворачивает струйную трубку. Вследствие этого в полостях цилиндра возникает перепад давлений и начинается движение поршня и связанных с ним деталей. При вращении датчика положения ДОС в схеме управления вырабатывается сигнал, пропорциональный перемещению, который вычитается в блоке управления из задающего сигнала, и результирующий сигнал подается на обмотки ЭМП. При нулевом рассогласовании струйная трубка устанавливается в нейтральное положение и привод останавливается.
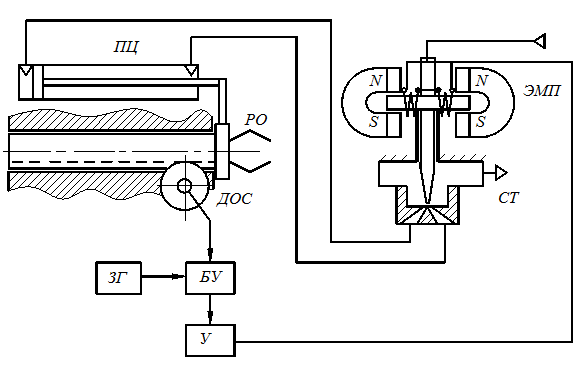
Рис. 9.45
Для стабилизации работы привода в блоке предусмотрено введение сигнала обратной связи по скорости, который образуется посредством дифференцирования сигнала углового положения. Для повышения точности позиционирования (уменьшения трения) поршень изготовлен из фторопласта. Точность позиционирования  = 0,2 ... 0,5 мм зависит от коэффициента усиления К = 13. . .5.
= 0,2 ... 0,5 мм зависит от коэффициента усиления К = 13. . .5.
Следящий пневмопривод обладает большими скоростями слежения, чем гидравлический. В то же время ЭПСП обладает низкой жесткостью, обусловленной сжимаемостью воздуха, меньшим по сравнению с гидроприводом запасом устойчивости и малой выходной мощностью.
Дата добавления: 2019-09-30; просмотров: 888;
Поиск по сайту
Узнать еще
- Впускные, выпускные клапаны и седла, приводы клапанов
- ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ ПРИВОДЫ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ
- Гидравлические приводы
- Гидравлические приводы
- Гидравлические приводы промышленных роботов
- Гидравлические следящие приводы (гидроусилители)
- Гидроприводы вращательного движения
- Гидроприводы поворотного движения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
