ПНЕВМОПРИВОДЫ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ
Пневматические приводы по сравнению с гидравлическими и электромеханическими имеют некоторые преимущества, в частности, наибольшие скорости движения рабочих органов, минимальные затраты на проектирование, сборку и эксплуатацию. Основными недостатками их являются низкая жесткость и ненадежное регулирование скорости исполнительных двигателей. Последние достижения в разработке пневмоустройств с автоматическим управлением позволяют уменьшить число недостатков пневмоприводов.
Пневмосистема автоматического натяжения бумажной ленты
При разрезке бумажной ленты, сматываемой с рулона, очень важно иметь постоянное ее натяжение, влияющее на точность отрезаемых частей. Изменение натяжения вызывается в основном уменьшением диаметра рулона в процессе разматывания. Чтобы рулон не мог разматываться самопроизвольно, его притормаживают. Диаметр тормозного барабана – величина постоянная, а диаметр рулона – переменная. Поэтому тормозной момент на барабане тоже должен быть переменным. Для обеспечения постоянного натяжения ленты тормозной момент должен в процессе разматывания уменьшаться. В пневмосистеме, изображенной на рис.9.43, эта задача решается с помощью дросселирующего пневмораспределителя ДПР, управляющего работой пневмоцилиндра ПЦ1 одностороннего действия [6].
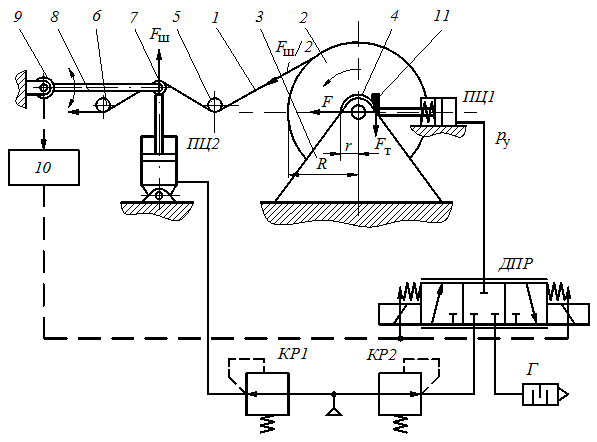
Рис. 9.43
Бумажная лента 1 сматывается с рулона 2, установленного на опорах 3 на одной оси с тормозным барабаном 4. Лента проходит через неподвижные ролики 5, 6 и подвижный 7, перемещаемый штоком пневмоцилиндра ПЦ2. Ролик 7 установлен на штоке 8, угол поворота которого контролируется датчиком 9. В пневмоцилиндр ПЦ2 воздух подается из сети через редукционный клапан КР1, обеспечивающий постоянное давление в поршневой камере цилиндра и, следовательно, постоянную силу FШ на его штоке.
Постоянное давление перед распределителем ДПР обеспечивает редукционный клапан КР2. Пневмораспределитель ДПР представляет собой быстродействующий золотниковый пневмоусилитель с электроуправлением. Сигнал управления в обмотки ДПР подается от системы управления 10. Рабочие щели ДПР соединяют ПЦ1 с КР2 и глушителем Г. Давлением управления шток пневмоцилиндра прижимает тормоз 11 к барабану 4 силой F. Тормозной момент МТ на барабане пропорционален входному сигналу управления и определяется из условия равенства моментов силы натяжения FШ /2 и тормозной силы FТ :
FШ /2 R = FT r .
Отсюда легко определяется зависимость F(R). Так как FТ = f F, где f – коэффициент трения в контакте тормоза 11 и барабана 4, то
F f r = FШ R /2.
Следовательно,
F = R FШ /(2 f r). (9.1)
Из полученного выражения следует, что сила F и давление управления рУ должны уменьшаться пропорционально уменьшению радиуса рулона R. Если эта зависимость нарушается , то шток пневмоцилиндра ПЦ2 опускается или поднимается, отклоняя шток 8 от горизонтального положения. Датчик угла 9 подает сигнал в систему управления 10, где он сравнивается с заданным, усиливается и подается на управление в обмотки пневмораспределителя ДПР. В результате действия этой обратной связи давлением управления сила F приводится в соответствие с выражением (9.1), полученным из условия постоянства силы натяжения ленты.
Дата добавления: 2019-09-30; просмотров: 826;
Поиск по сайту
Узнать еще
- D-триггер с динамическим управлением
- Автоматические системы с комбинированным управлением
- Автоматическими регуляторами возбуждения (АРВ)
- ВОЗМОЖНОСТИ СУДЕБНО-ПСИХОЛОГИЧЕСКОЙ ЭКСПЕРТИЗЫ ПО ДЕЛАМ О ПРОИСШЕСТВИЯХ, СВЯЗАННЫХ С УПРАВЛЕНИЕМ ТЕХНИКОЙ
- ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ ПРИВОДЫ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ
- Гидроприводы с машинно-дроссельным управлением, работающие при переменном давлении
- Гидроприводы с машинно-дроссельным управлением, работающие при постоянном давлении
- Инверторы с прямым цифровым управлением

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
