УРАВНОВЕШИВАНИЕ РАБОЧИХ ОРГАНОВ
Система управления приводами с уравновешивающими гидроцилиндрами должна обеспечивать: постоянное давление в камере гидроцилиндра при подвижном и неподвижном рабочем органе; необходимый расход масла в гидроцилиндр, пропорциональный скорости штока при подъеме рабочего органа; долговременное удержание штока цилиндра в неподвижном состоянии после отключения энергопитания гидросистемы; минимальные затраты мощности.
Постоянное давление в рабочей камере необходимо поддерживать с минимальной погрешностью (при постоянной массе рабочего органа), так как изменение давления сказывается, в конечном счете, на точности обработки деталей. Постоянное давление, как известно, можно получить от отдельного насоса с помощью клапана давления КД (рис. 9.37, а), работающего в режиме переливного клапана. Реле давления предназначено для контроля давления в цилиндре Ц и пневмогидроаккумуляторе ПГА после отключения насоса.
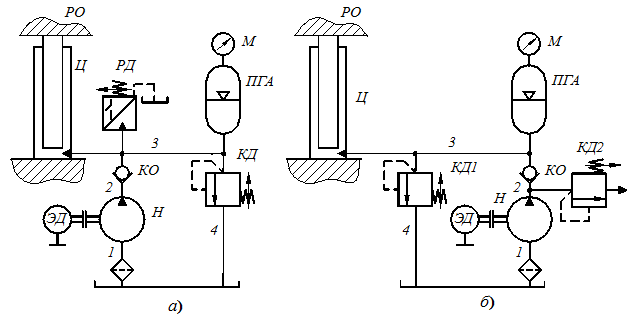
Рис. 9.37
Постоянное давление в цилиндре Ц (рис. 9.37, б) достигается настройкой клапана КД. В схеме насос Н обеспечивает независимую работу цилиндра и гидросистемы. Возможность влияния работы остальных гидродвигателей системы, питающихся от напорного клапана КД2, на давление в гидролинии 2, уменьшается с введением в схему аккумулятора ПГА.
Система управления, рис. 9.38, состоит из клапана давления КД2 и аккумулятора ПГА. Обратный клапан КО удерживает давление в ПГА после отключения энергопитания системы. Поэтому случайное падение давления в гидросистеме на работе цилиндра не отражается. Клапан КД2 работает в предохранительном режиме при опускании рабочего органа, ограничивая верхнюю границу диапазона регулируемого давления. В режиме подпитки – с частичной редукцией, после снижения давления до нижней границы диапазона.
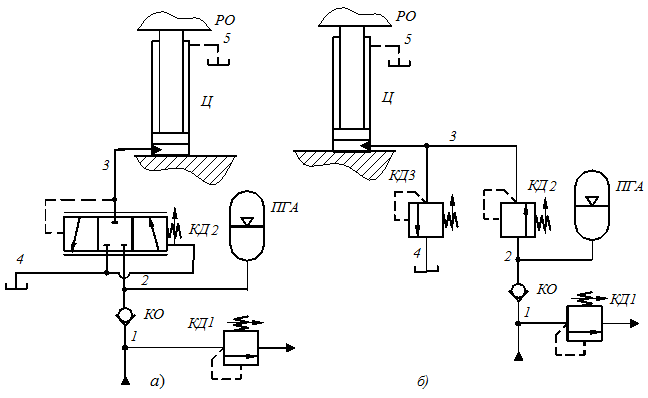
Рис. 9.38
При неподвижном рабочем органе он перекрывает слив из рабочей камеры цилиндра. При резком подъеме рабочего органа клапаны КО и КД2 соединяют рабочую камеру с гидросистемой и аккумулятором, уменьшая влияние возникающих при разгоне инерционных сил. Привод не потребляет энергию при неподвижном рабочем органе.
В гидросистеме (рис. 9.38, б) используются три клапана КД1 ... КД3 и аккумулятор ПГА. Функции КД1 те же, что и у КД2 в схеме рис. 9.37, б, а функции КД2 (рис. 9.38) здесь разделены. Клапан КД3 работает в предохранительном режиме, а КД2 – в режиме подпитки с частичной редукцией. Благодаря возможности использования клапанов непрямого регулирования такая система позволяет повысить давление в рабочей камере цилиндра, расход в него, устойчивость работы клапанов. Привод, как и предыдущий, не потребляет энергию при остановке рабочего органа, долговременно удерживает его без дополнительных затрат мощности и обеспечивает нейтрализацию силы инерции при резком подъеме рабочего органа.
Если уравновешиваемая масса в течение технологического процесса изменяется (траверсы с подвижными шпиндельными бабками, шпиндельные бабки с различными по массе инструментами), то применяются схемы автоматического управления давлением в уравновешивающих цилиндрах. В схеме управления с отдельным насосом (рис. 9.39) параллельно основному клапану давления КД подключен клапан давления с пропорциональным управлением КДП. Клапан КД настраивается на максимальное давление, пропорциональное максимальному весу уравновешиваемой системы, а КДП обеспечивает регулировку давления от максимального до минимального его значения.
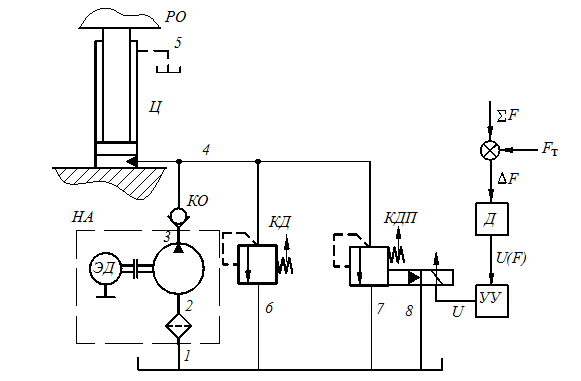
Рис. 9.39
Чувствительным элементом этой следящей системы является датчик Д, фиксирующий, например, силу F, действующую на выходное звено привода подачи, или деформацию от этой силы, или угол поворота уравновешиваемой силы. Выходным сигналом датчика является напряжение, пропорциональное либо силе, либо прогибу, либо углу. В управляющем устройстве УУ этот сигнал усиливается, функционально преобразуется и в виде напряжения, пропорционального давлению р в рабочей камере Ц, подается на электромагнит КДП. Шток цилиндра создает на РО уравновешивающую силу FT, которая сравнивается датчиком с действующей нагрузкой  F и в виде сигнала ошибки U(F) поступает в УУ. Нулевой ошибке U(F)=0 соответствует напряжение, пропорциональное действующей нагрузке.
F и в виде сигнала ошибки U(F) поступает в УУ. Нулевой ошибке U(F)=0 соответствует напряжение, пропорциональное действующей нагрузке.
В приводах, изображенных на рис. 9.40 и 9.41, САУ работает только в моменты превышения нагрузки. В остальное время гидросистема управления работает как в схемах рис. 9.38. В схеме применен гидрораспределитель РП с пропорциональным управлением.
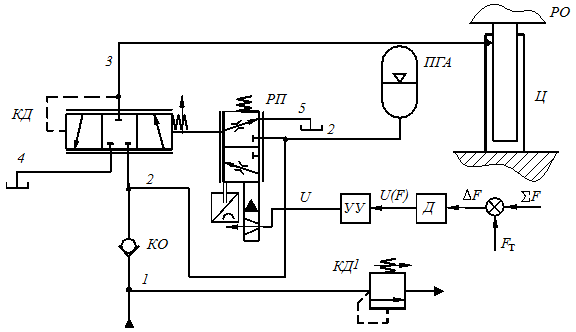
Рис. 9.40
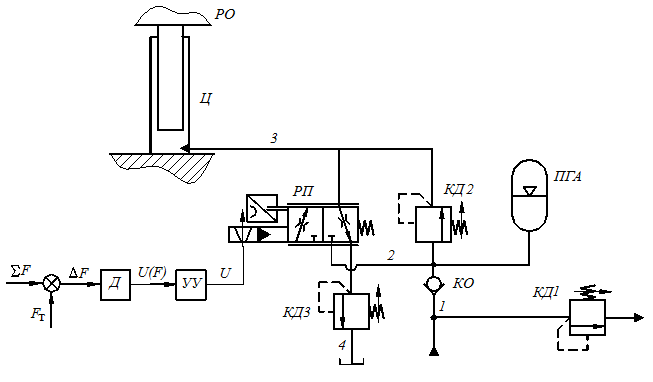
Рис. 9.41
При изменении массы уравновешиваемой системы управляющее устройство выдает сигнал на электромагнит РП. Смещение плунжера РП, пропорциональное этому сигналу, приводит к сдвигу плунжера КД влево с помощью давления масла в аккумуляторе А или в гидросистеме (рис. 9.40). Давление в рабочей камере цилиндра Ц повышается до требуемого значения. После уменьшения массы системы до номинального значения САУ отключается. В гидросистеме (рис. 9.41) распределитель РП подключен непосредственно к уравновешивающему цилиндру и включается в работу только в случае увеличения массы уравновешиваемой системы. В остальном работа САУ происходит так же, как в гидросистеме рис. 9.38.
Дата добавления: 2019-09-30; просмотров: 844;
Поиск по сайту
Узнать еще
- I. Идентификация потенциально вредных и (или) опасных факторов на рабочих местах.
- II. Филогенез органов чувств.
- А - для исследования органов средостения; б - для исследования легочной ткани.
- Административная деятельность органов внутренних дел.
- Административно – правовой статус федеральных органов исполнительной власти и органов исполнительной власти субъектов Российской Федерации.
- Административно- хозяйственная деятельность таможенных органов
- Аккредитация органов по сертификации и испытательных (измерительных) лабораторий
- АКТЫ ВЫСШИХ СУДЕБНЫХ ОРГАНОВ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
