УСТРОЙСТВА ГИДРО- И ПНЕВМОАВТОМАТИКИ
В этой главе рассматриваются гидравлические и пневматические преобразователи как элементы гидро- и пневмоусилителей. Электромеханические преобразователи, как правило, применяются в усилителях для преобразования тока управления в механическое перемещение якоря и соединенных с ним частей маломощных гидро- и пневмоусилителей. Преобразователи типа сопло - заслонка и струйная трубка чаще используются как маломощные усилители в первых ступенях гидро- и пневмоусилителей. Электрогидроусилители и аппаратура с пропорциональным управлением находят применение в гидро- и пневмоприводах с автоматическим управлением. С их помощью можно управлять вручную с пульта или по программе скоростью и положением рабочих органов станков, роботов, автоматических линий и так же, дистанционно, изменять параметры потока рабочей среды.
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Электромеханический преобразователь (ЭМП) – управляющий элемент электрогидроусилителей (ЭГУ) и электропневмоусилителей (ЭПУ), преобразующий ток обмотки управления в угловое или линейное перемещение якоря.
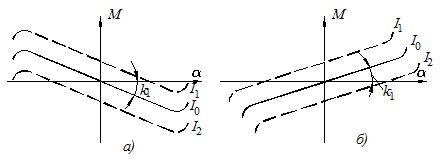
Рис. 8.1
Наибольшее применение в ЭГУ и ЭПУ находят ЭМП с якорем, перемещающимся поперек линий индукции магнитного поля в воздушном рабочем зазоре (первый тип), и ЭМП с якорем, перемещающимся вдоль линий индукции (второй тип) [4]. На рис. 8.1 показаны обобщенные статические характеристики (зависимости электромагнитного момента М от угла  поворота якоря) ЭМП первого (рис. 8.1, а) и второго (рис. 8.1, б) типов. Коэффициент k1 характеризует жесткость электромагнитной системы. Отрицательной жесткости (рис. 8.1,а) соответствует устойчивое, а положительной (рис. 8.1,б) – неустойчивое состояние якоря в нейтральном положении при отсутствии тока управления. Поэтому для устойчивости якоря ЭМП второго типа преобразователи снабжают механической пружиной, жесткость которой выбирается больше жесткости магнитной системы. Эквивалентная жесткость в этом случае становится отрицательной, и якорь отклоняется в обе стороны пропорционально току управления. У ЭМП первого типа устойчивость якоря достигается за счет выбора определенной геометрии поверхностей, образующих рабочий зазор. Однако пружины в них тоже используются для точной регулировки ЭГУ.
поворота якоря) ЭМП первого (рис. 8.1, а) и второго (рис. 8.1, б) типов. Коэффициент k1 характеризует жесткость электромагнитной системы. Отрицательной жесткости (рис. 8.1,а) соответствует устойчивое, а положительной (рис. 8.1,б) – неустойчивое состояние якоря в нейтральном положении при отсутствии тока управления. Поэтому для устойчивости якоря ЭМП второго типа преобразователи снабжают механической пружиной, жесткость которой выбирается больше жесткости магнитной системы. Эквивалентная жесткость в этом случае становится отрицательной, и якорь отклоняется в обе стороны пропорционально току управления. У ЭМП первого типа устойчивость якоря достигается за счет выбора определенной геометрии поверхностей, образующих рабочий зазор. Однако пружины в них тоже используются для точной регулировки ЭГУ.
Преобразователи первого типа обладают высокой линейностью угловой
характеристики и сравнительно большими угловыми перемещениями якоря.
Преобразователи второго типа находят применение в ЭГУ с небольшим  линейным перемещением якоря и позволяют получить компактную, герметичную подвеску подвижной системы ЭГУ.
линейным перемещением якоря и позволяют получить компактную, герметичную подвеску подвижной системы ЭГУ.
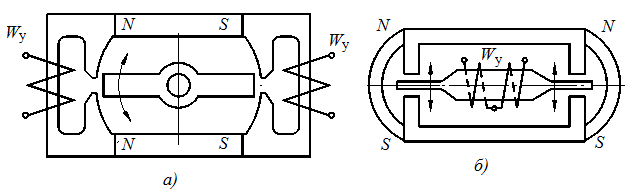
Рис. 8.2
На рис. 8.2, а приведена схема магнитной системы ЭМП мостового типа с возбуждением от постоянных магнитов и независимыми цепями обмотки управления (ЭМП первого типа), на рис. 8.2, б - то же, но с перемещением якоря вдоль силовых линий (ЭМП второго типа). Преобразователи с возбуждением от постоянных магнитов имеют преимущества перед ЭМП с электромагнитным возбуждением: отсутствие постоянного потребления электроэнергии, нагрева и старения обмоток и др. Недостатком является уменьшение магнитного поля в течение времени хранения. Схема ЭМП, приведенная на рис. 8.2. б, является наиболее применяемой как у нас в стране, так и за рубежом.
На рис. 8.3 представлена конструкция подвижного герметичного узла, состоящего из тонкостенной трубки - пружины 1, закрепленной в корпусе 2 ЭГУ. На свободный конец трубки монтируются симметричный якорь 3 и заслонка 4 усилителя типа сопло - заслонка. Перемещение якоря вызывает пропорциональное перемещение x заслонки. За счет упругих качеств трубки 1 заслонка возвращается в нейтральное положение после обнуления входного сигнала.
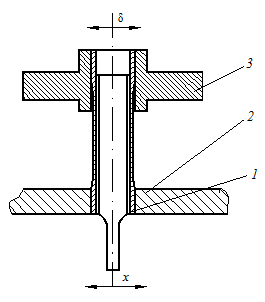
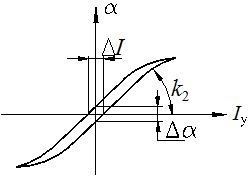
Рис. 8.3 Рис. 8.4
Управляющая характеристика (рис. 8.4) показывает зависимость углового (линейного) перемещения якоря от тока в обмотке управления при отсутствии внешней нагрузки. Она оценивается несколькими параметрами, в том числе: крутизной начального участка К2 ; зоной нечувствительности по току управления  I, в пределах которой угол остается постоянным; гистерезисом по углу или току управления
I, в пределах которой угол остается постоянным; гистерезисом по углу или току управления  . Неоднозначность управляющей характеристики отрицательно влияет на статические и динамические характеристики ЭГУ, на точность и устойчивость. Результаты исследований [4] показывают, что гистерезисная петля статической характеристики оказывает влияние на частотные характеристики ЭМП при величине > 5...10 %. В большинстве случаев она приводит к дополнительному фазовому сдвигу ЛФЧХ преобразователя. Одним из способов улучшения характеристик является введение внешнего высокочастотного осциллирующего сигнала. Передаточная функция ЭМП может быть представлена произведением передаточных функций апериодического и колебательного звеньев:
. Неоднозначность управляющей характеристики отрицательно влияет на статические и динамические характеристики ЭГУ, на точность и устойчивость. Результаты исследований [4] показывают, что гистерезисная петля статической характеристики оказывает влияние на частотные характеристики ЭМП при величине > 5...10 %. В большинстве случаев она приводит к дополнительному фазовому сдвигу ЛФЧХ преобразователя. Одним из способов улучшения характеристик является введение внешнего высокочастотного осциллирующего сигнала. Передаточная функция ЭМП может быть представлена произведением передаточных функций апериодического и колебательного звеньев:
W(s) = 1 /((Т1 s +1)(Т22s2+ 2 z Т2 s +1)).
Параметры, полученные экспериментально:
Т1= 12×10-3c; Т2 = 2,32×10-3с; z = 0,33.
Логарифмические частотные характеристики (рис. 8.5) показывают, что данный ЭМП устойчив; запас устойчивости по амплитуде зависит от коэффициента z. С уменьшением z запас устойчивости уменьшается.
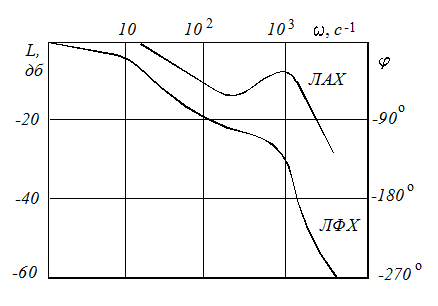
Рис. 8.5
Дата добавления: 2019-09-30; просмотров: 959;
Поиск по сайту
Узнать еще
- II. ПЕРЕФЕРИЙНЫЕ УСТРОЙСТВА
- IV УСТРОЙСТВА ФИЛЬТРАЦИИ СИГНАЛОВ
- Аварии на объектах обустройства
- Автоматизированные загрузочные устройства – важнейшая часть механообрабатывающей системы. Классификация устройств загрузки . Питатели.
- Автоматические устройства управления и регулировок приемника
- Аналитическая модель производительности дискового зубчатого бункерного загрузочного устройства с кольцевым ориентатором
- Аналитический метод определения погрешности схемы измерительного устройства.
- Аналоговые регистрирующие устройства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
