ПРЕОБРАЗОВАТЕЛИ ТИПА СОПЛО-ЗАСЛОНКА
Это преобразователи, состоящие из одного или двух сопел и заслонки, расстояние между которыми автоматически изменяется с помощью ЭМП. Преобразователь(рис. 8.6) является автоматически управляемым гидравлическим сопротивлением.
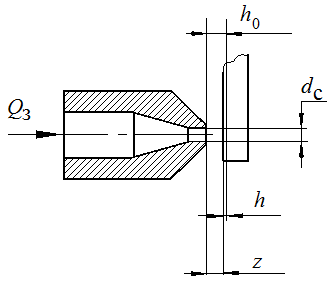
Рис. 8.6
Расход масла через преобразователь определяется по известной формуле расхода через дроссель
QДР= mз fщ( 2 g ( p1 – p2) / g )0,5 , (8.1)
где mз- коэффициент расхода преобразователя; fщ = p dсz - площадь дроссельной щели между соплом и заслонкой; dс- диаметр отверстия сопла; z - расстояние между заслонкой и соплом; p1- p2- разность давлений на дроссельной щели.
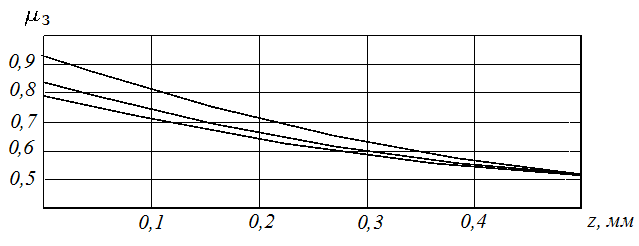
Рис. 8.7
Коэффициент расхода mз уменьшается с увеличением зазора z (рис. 8.7) [5]. Для практических расчетов предлагается определять его по формуле:
mз= m0– Dm × h / h0, (8.2)
где m0- коэффициент расхода при нейтральном положении заслонки (z = h0); Dm - изменение коэффициента расхода при смещении заслонки от нейтрального положения на величину h = h0, h = h0 – z - перемещение заслонки от нейтрального положения; h0 - максимальный ход заслонки от нейтрального положения в одну сторону. Рекомендуемые значения m0и Dm :
| dc , мм | 1,0 | 2,0 |
| h0, мм | 0,125 | 0,1 |
| m0 | 0,785 | 0,8 |
| Dm | 0,107 | 0,17 |
В гидроусилителях преобразователь сопло-заслонка применяется с последовательно включенным постоянным гидравлическим сопротивлением перед соплом или после него (рис. 8.8).
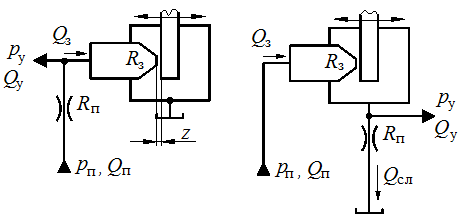
Рис. 8.8
При этом давление управления рУ в точке соединения постоянного RПи управляемого RЗ гидравлических сопротивлений изменяется пропорционально смещению заслонки: возрастает с уменьшением зазора (рис. 8, а), возрастает с увеличением зазора (рис. 8.8 ,б). Этим давлением управляются золотниковые усилители и маломощные гидродвигатели.
Если сравнить статические характеристики этих схем, то можно сделать следующие выводы. При одинаковых значениях подводимого давления и перемещениях заслонки схема преобразователя с постоянным сопротивлением перед соплом имеет два преимущества перед схемой (рис. 8.8, б) – меньший расход масла через сопло и большие значения давления управления. Почти в два раза меньший расход QЗ– это меньшие затраты мощности насосной установки на управление, а большое давление управления – это большие активные составляющие равнодействующей силы, приводящей в движение управляемый преобразователем золотник или гидродвигатель
. Рис. 8.9
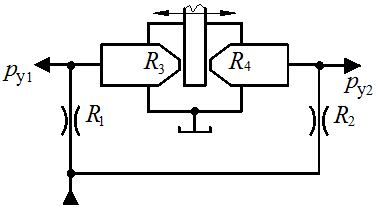
В гидроусилителях преобразователь сопло-заслонка по схеме рис. 8.8, а применяется как гидравлический мост, состоящий из двух постоянных гидравлических сопротивлений R1, R2 (рис. 8.9) и двух управляемых R3, R4. Сила статического давления жидкости на заслонку определяется по формулам:
FC= p dC2pу/ 4 - для схемы на рис. 8.8, а;
FC= p dC2pп/ 4 - для схемы на рис. 8.8, б;
FC= p dC2( pу1– pу2) / 4 - для схемы на рис. 8.9 при перемещении заслонки влево;
FC= p dC2( pу2– pу1) / 4 - для схемы на рис. 8.9 при перемещении заслонки вправо.
В переходном процессе на заслонку действует сила, вызываемая изменением количества движения потока при изменении течения между соплом и заслонкой.
Динамические характеристики преобразователя сопло-заслонка в первом приближении можно считать аналогичными характеристикам безынерционного звена ввиду незначительной массы заслонки и малых ее перемещений. Чаще всего силы, действующие на заслонку, и ее массу приводят к якорю ЭМП.
Дата добавления: 2019-09-30; просмотров: 1521;
Поиск по сайту
Узнать еще
- Cпециализированные преобразователи
- D - триггер типа «защелка»
- DC-AC преобразователи. Двухактный инвертор.
- А). Классификация предпринимательских структур по типам на втором этапе становления постсоветского предпринимательства.
- А). Классификация предпринимательских структур по типам на первом этапе становления постсоветского предпринимательства
- Абсолютные и дифференциальные вихретоковые преобразователи
- Автогенераторы LC-типа
- Автоколебательные системы томпсоновского типа

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
