Принцип действия индукционного лага
Принцип действия индукционного лага основан на законе электромагнитной индукции. Если в постоянном магнитное поле с индукцией В (рис. 2.1) перемещать проводник длинной l с некоторой скоростью v, то в этом проводнике будет индуктироваться э.д.с., величина которой определяется равенством:
 , (6.1)
, (6.1)
 где к – масштабный коэффициент, a - угол между векторами скорости перемещения проводника и индукции магнитного поля. Казалось бы это обстоятельство можно легко использовать для измерения скорости судна, если над палубой натянуть проводник, в котором магнитное поле Земли будет индуктировать необходимый для оценки скорости сигнал. Однако при подключении к указанному проводнику измерительной системы (на рисунке – вольтметра V) напряжение будет индуктироваться и в проводниках, осуществляющих это подключение, так как они, как и измерительный проводник, движутся относительно магнитного поля. В результате суммарная э.д.с. в замкнутом измерительном контуре будет равна нулю и вольтметр ничего не покажет.
где к – масштабный коэффициент, a - угол между векторами скорости перемещения проводника и индукции магнитного поля. Казалось бы это обстоятельство можно легко использовать для измерения скорости судна, если над палубой натянуть проводник, в котором магнитное поле Земли будет индуктировать необходимый для оценки скорости сигнал. Однако при подключении к указанному проводнику измерительной системы (на рисунке – вольтметра V) напряжение будет индуктироваться и в проводниках, осуществляющих это подключение, так как они, как и измерительный проводник, движутся относительно магнитного поля. В результате суммарная э.д.с. в замкнутом измерительном контуре будет равна нулю и вольтметр ничего не покажет.
Преодолеть указанное обстоятельство возможно, если часть измерительного контура сделать неподвижным относительно земного магнитного поля, используя в качестве проводника морскую воду 3 (Рис. 2.2). В нее 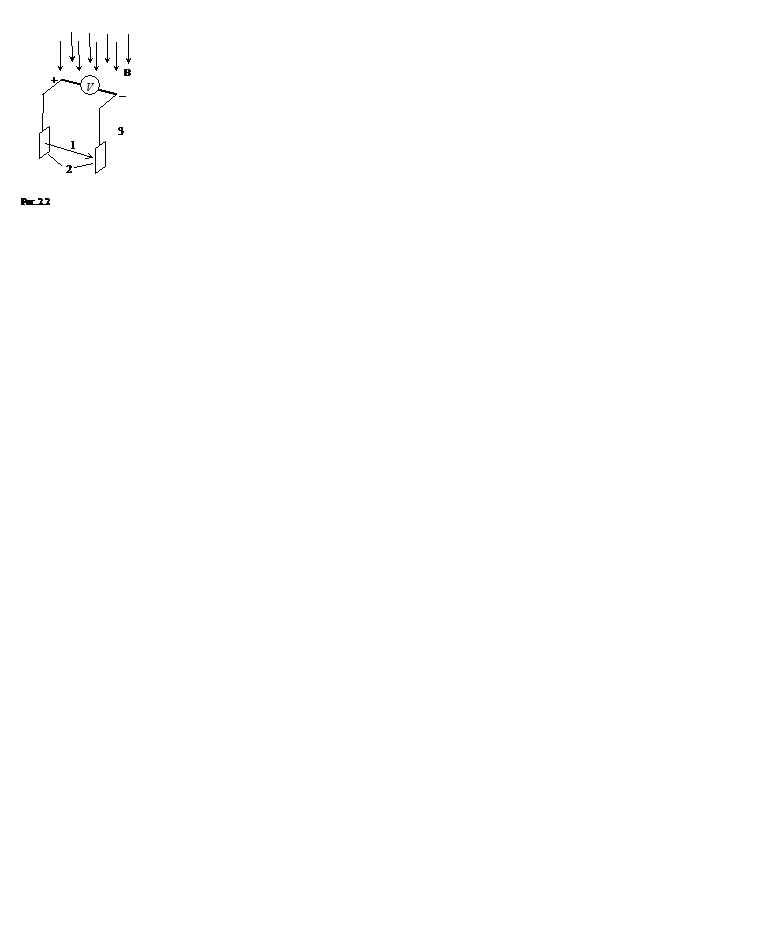 следует опустить электроды 2, связанные с измерительным проводником. Цепь замкнется через воду по линии 1, и компенсации напряжения, наведенного в измерительном проводнике, не произойдет. Лаги, выполненные по указанной схеме, получили название геоэлектромагнитных [17]. Основными недостатками такого лага являются наличие значительных
следует опустить электроды 2, связанные с измерительным проводником. Цепь замкнется через воду по линии 1, и компенсации напряжения, наведенного в измерительном проводнике, не произойдет. Лаги, выполненные по указанной схеме, получили название геоэлектромагнитных [17]. Основными недостатками такого лага являются наличие значительных
| Рис. 2.3 |
| U |
| п |
| 1 |
| 2 |
| 2 |
| 3 |
| 4 |
| 5 |
| 6 |
| 6 |
| U |
| в |
В этой модели в качестве измерительного проводника использовалась морская вода, э.д.с. в которой индуктировало специально созданное с помощью электромагнита 3 (рис. 2.3), стабильное по напряженности магнитное поле 6. Если обмотка этого электромагнита питается напряжением Uп постоянного тока, то напряжение Uв, снимаемое с помощью электродов 2 с участка 1 морской среды, будет определяться выражением (6.1). В связи с тем, что напряженность магнитного поля, создаваемого электромагнитом 3, значительно превышает напряженность земного магнитного поля, чувствительность у такого измерителя скорости судна будет значительно выше, чем у геоэлектромагнитного. Стабильность величины индукции во времени, в свою очередь, снижает его погрешность.
Электромагнит с контактами 2 размещается в корпусе 5, который устанавливается в шахте лага с помощью клинкета. Описанное устройство называют индукционным преобразователем сигнала скорости судна или просто индукционным преобразователем (ИП).
К сожалению, при питании электромагнита напряжением постоянного тока вокруг электродов 2, которые при движении судна в одном направлении имеют неизменный знак потенциала, образуется объемные заряды из ионов, присутствующих в морской среде. У отрицательного контакта группируются анионы, а у положительного – катионы. Эти заряды компенсируют разницу потенциалов, возникающую у электродов за счет движения судна, и делают измерение скорости практически невозможным.
Для устранения указанного недостатка электромагнит 3 питают напряжением переменного тока. При этом полярность э.д.с., наведенной в воде, будет меняться с частотой напряжения питания, что не позволит ионам концентрироваться у определенного контакта. Однако в рассматриваемом случае в морской среде, равно как и в проводниках, находящихся в зоне действия магнитного поля электромагнита, возникает дополнительная э.д.с. за счет обычного трансформаторного эффекта. При этом выходной сигнал датчика будет складываться из двух составляющих:
 , (6.2)
, (6.2)
где k1 и k2 – масштабные коэффициенты. Если индукция В изменяется по гармоническому закону
 , (6.3)
, (6.3)
где Вт – ее амплитудное значение, а w - частота напряжения питания, то равенство (6.2) можно переписать в виде:
 (6.4)
(6.4)
 Из полученного выражения видно, что составляющая выходного сигнала, обусловленная наличием трансформаторного эффекта, не зависит от скорости судна, имеет ту же частоту, что и полезная составляющая, определяемая первым слагаемым, и сдвинута по фазе относительно полезной составляющей на угол, равный 900. Эта компонента выходного сигнала получила название квадратурной помехи.
Из полученного выражения видно, что составляющая выходного сигнала, обусловленная наличием трансформаторного эффекта, не зависит от скорости судна, имеет ту же частоту, что и полезная составляющая, определяемая первым слагаемым, и сдвинута по фазе относительно полезной составляющей на угол, равный 900. Эта компонента выходного сигнала получила название квадратурной помехи.
Как и любая помеха, она должна быть устранена. Это может быть достигнуто путем непосредственной ее компенсации сигналом, равным ей по величине и противоположным по фазе, или путем фазового детектирования. Возможно одновременное использование обеих способов.
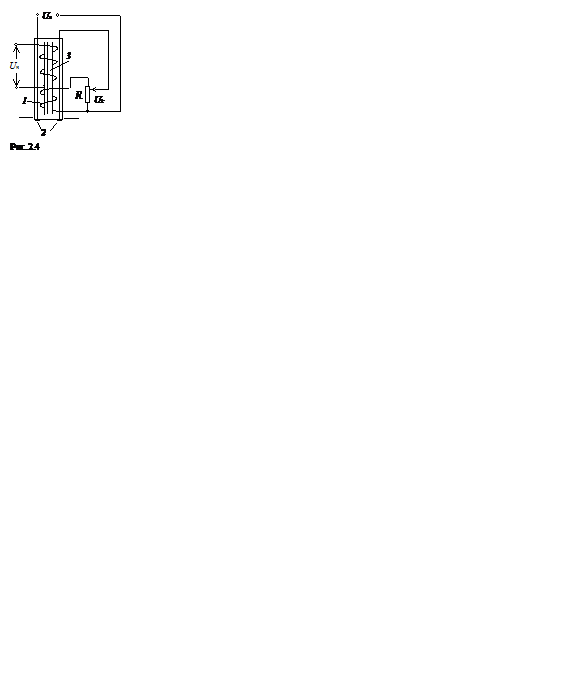
Непосредственная компенсация помехи может быть осуществлена, например, с помощью схемы, показанной на рис. 2.4. На сердечник электромагнита 3 наматывается дополнительная обмотка 1, в которой индуктируется сигнал, пропорциональной величине напряжения квадратурной помехи. С этой обмоткой связан потенциометр R, позволяющий выставить на его выходе напряжение Uk так, чтобы оно было равно значению указанной помехи. Это напряжение вычитается из основного сигнала датчика, оставляя в нем лишь полезную составляющую. Принцип устранения помехи путем фазового детектирования выходного сигнала ИП заключается 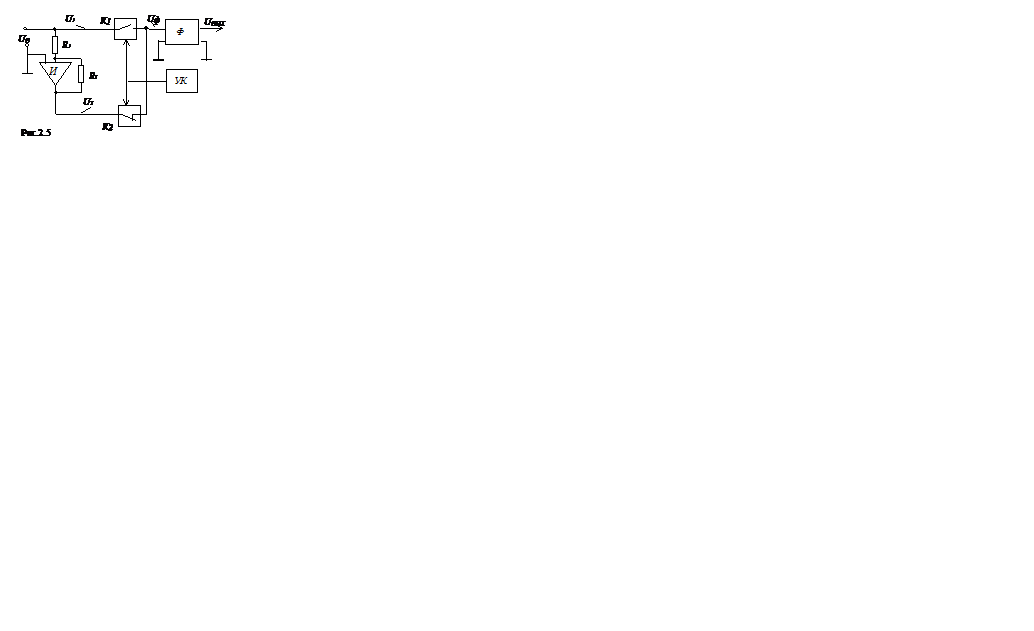 в следующем. Напряжение Uв выходного сигнала ИП поступает на фильтр Ф (рис. 2.5) или непосредственно, когда замкнут ключ К1, или через инвертор И, изменяющий фазу сигнала на 1800, когда замкнут ключ К2. Состояние ключей К1 и К2 определяется устройством УК управления ключами и изменяется через
в следующем. Напряжение Uв выходного сигнала ИП поступает на фильтр Ф (рис. 2.5) или непосредственно, когда замкнут ключ К1, или через инвертор И, изменяющий фазу сигнала на 1800, когда замкнут ключ К2. Состояние ключей К1 и К2 определяется устройством УК управления ключами и изменяется через 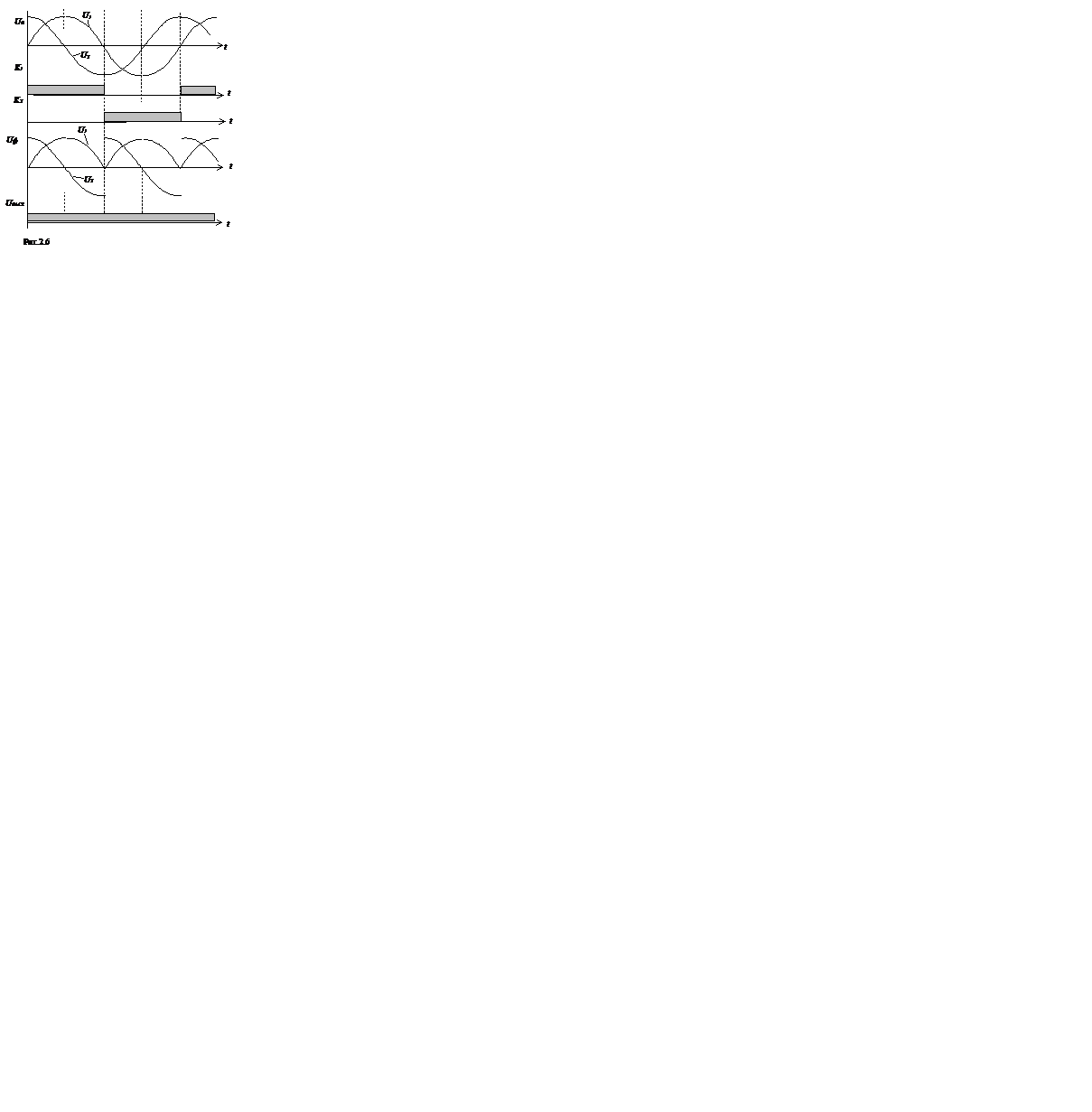 полпериода напряжения питания ИП (рис. 2.6). Закон изменения напряжения Uф основного сигнала и сигнала помехи на входе фильтра Ф свидетельствует о том, что квадратурная помеха U2 в течение каждого полпериода колебаний имеет нулевое среднее значение, в то время как среднее значение полезного сигнала не равно нулю. Таким образом, путем осреднения напряжения, поступающего на вход фильтра, удается подавить квадратурную помеху и на его выходе получить напряжение постоянного тока, пропорциональное скорости движения судна.
полпериода напряжения питания ИП (рис. 2.6). Закон изменения напряжения Uф основного сигнала и сигнала помехи на входе фильтра Ф свидетельствует о том, что квадратурная помеха U2 в течение каждого полпериода колебаний имеет нулевое среднее значение, в то время как среднее значение полезного сигнала не равно нулю. Таким образом, путем осреднения напряжения, поступающего на вход фильтра, удается подавить квадратурную помеху и на его выходе получить напряжение постоянного тока, пропорциональное скорости движения судна.
Наряду с указанными помехами в общем случае следует учитывать [7]:
§ помеху в виде напряжения постоянного тока из-за поляризации электродов;
§ напряжение смещения нуля;
§ напряжение высокочастотных помех от судовых радиоустройств;
§ напряжение синфазной помехи, возникающее вследствие циркуляции токов по корпусу судна.
Если указанные помехи превышают допустимые для данного прибора пределы, они также должны быть уменьшены или устранены полностью.

Принципиально для определения скорости судна достаточно измерить напряжение на выходе фильтра и учесть масштабный коэффициент, связывающий между собой данные параметры. Однако на практике, с целью повышения точности измерений и расширения технических возможностей лага, как правило, осуществляют преобразование этого выходного сигнала в цифровую форму и схему прибора дополняют различными регуляторами, контрольно – сигнальными устройствами и системами диагностики неисправностей. В результате типовая схема основных систем лага приобретает вид, показанный на рис. 2.7. Эта схема включает в себя датчик сигналов ДС, преобразователь аналогового сигнала ПАС, преобразователь напряжение – время ПНВ, преобразователь время – цифра ПВЦ, вычислитель В, устройства индикации УИ и блок питания БП
Дата добавления: 2017-02-13; просмотров: 4183;
Поиск по сайту
Узнать еще
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Разрывы вульвы и влагалища
- I. Этические принципы психолога
- II группа действий. ВЗАИМОДЕЙСТВИЯ
- II. ОБУЧЕНИЕ ПРОСТЫМ БОЕВЫМ ДЕЙСТВИЯМ
- II. Общие методические принципы в канистерапии
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Принцип действия и режимы работы синхронной машины

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
