Управление угловыми движениями вертолета
Конечной целью пилотирования является управление перемещением центра тяжести вертолета относительно земли, т.е. управление траекторными движениями. Однако необходимым условием выполнения траекторных движений является обеспечение стабилизации угловых движений вертолета. Так как по угловым движениям вертолет является неустойчивым, то обеспечение стабилизации угловых движений вертолета требует затраты больших усилий со стороны летчика, отвлекая его от выполнения его основных функций.
При изменении вертолета заданного углового положения летчик получает об этом визуальную информацию либо по земным ориентирам, либо по указателям курса (направления), крена и тангажа.
Реагируя на это изменение, летчик воздействует посредством рычагов управления на органы управления вертолетом (рис.1) и возвращает его к первоначальному положению.
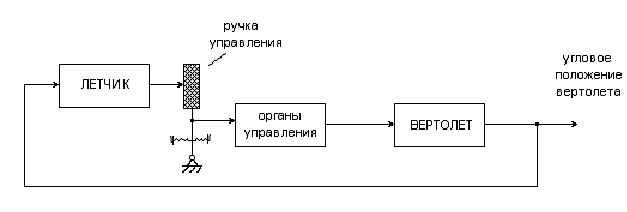
Рис.1 Схема ручного управления вертолетом.
Автопилот предназначен для разгрузки летчика от управления угловыми движениями вертолета, обеспечивая стабилизацию заданных угловых положений. При этом за летчиком остается функция контроля.
Автопилот представляет собою устройство, воспринимающее информацию об изменении угловых положений вертолета и отклоняющее соответствующим образом органы управления. Для получения информации об изменении угловых положений вертолета служат чувствительные элементы (рис.2), в качестве которых используются дистанционные датчики сигналов углов курса, крена и тангажа и датчики угловых скоростей вращения вертолета вокруг 3-х пространственных осей.
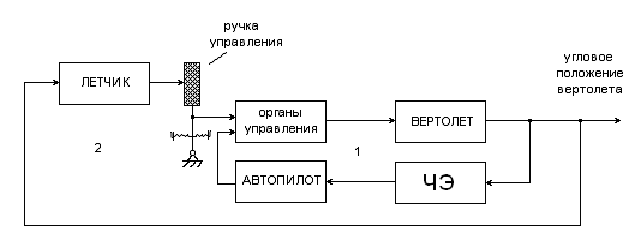
Рис.2 Схема включения каналов угловой стабилизации автопилота в систему управления вертолета
Сигналы с чувствительных элементов поступают в автопилот, где преобразуются, усиливаются и затем воздействуют на органы управления. Таким образом, АП выполняет функции летчика по обеспечению стабилизации угловых положений вертолета. При этом работает замкнутая система автоматического регулирования «Вертолет-автопилот» (контур 1). Особенностью данного автопилота является сохранение замкнутой системы регулирования «Вертолет-летчик» (контур 2) даже при работающем автопилоте. Это значит, что на органы управления могут одновременно воздействовать и летчик, и автопилот. Возможность такой совместной работы летчика и автопилота осуществляется посредством так называемого дифференциального управления, при котором результирующее перемещение органов управления вертолета равно алгебраической сумме перемещений от управляющих воздействие летчика и автопилота.
Дифференциальное управление осуществляется на вертолете при помощи электрогидравлических комбинированных агрегатов управления (типа КАУ-30Б, РА-60А), устанавливаемых в систему управления вертолета. Выходной шток таких рулевых агрегатов может перемещаться как от рычагов управления летчиком (при этом рулевой агрегат работает как гидроусилитель, необходимый в системе управления вертолетом для уменьшения усилий, прикладываемых летчиком к рычагам управления), так и от электрических сигналов АП, который управляет перемещением якоря специального электромагнитного поляризованного реле, установленного в рулевом агрегате. Якорь поляризованного реле перемещает специальный золотник (или сопло-заслонку), перемещение которого в свою очередь вызывает перемещение выходного штока рулевого агрегата.
Конструкция рулевых агрегатов такова, что перемещение органов управления от сигналов автопилота не передается на рычаги управления летчика, и ограничены 20 % полного перемещения органов управления. Такое ограничение необходимо для безопасности полета в случае отказа АП, т.к. большинство возможных отказов автопилота сопровождается появлением одностороннего сигнала на выходе и быстрых отклонений органов управления.
Вместе с тем такой ограниченный диапазон работы органов управления от сигналов АП в большинстве случаев вполне достаточен для парирования реальных возмущений, действующих на вертолет и стабилизации угловых положений вертолета.
Однако, в некоторых случаях (например, в канале направления при разгонах или торможении) такого запаса управления для АП недостаточно и стабилизация в этих случаях может нарушаться. Чтобы этого не происходило, в системе путевого управления вертолета установлены специальные рулевые агрегаты (типа РА-60А, с так называемой «перегонкой»).
«Перегонкой» называется такой режим работы рулевого агрегата, при котором происходит автоматическое перемещение с постоянной скоростью выходного штока рулевого агрегата вместе с рычагом управления летчика. Включается режим «перегонки» автоматически при полном использовании АП своего запаса управления (20% от полного запаса управления).
«Перегонка» как бы расширяет запас управления для автопилота, заставляя перемещаться рычаги управления летчика в ту же сторону, в которую не хватило запаса управления от АП. Скорость «перегонки» из условия безопасности выбирается достаточно малой (приблизительно 10% от max).
Суммарное перемещение органов управления (от АП и от «перегонки») вызовет движение вертолета к первоначальному положению, что приведет в свою очередь к автоматическому выключению «перегонки». При этом, хотя стабилизация и восстанавливается, запас управления от АП оказывается исчерпанным.
В случае необходимости летчик может остановить «перегонку» и заставить органы управления двигаться в нужном направлении, приложив определенное усилие к рычагам управления.
Угловые положения вертолета относительно каждой из трех пространственных осей – продольной, поперечной и вертикальной называется соответственно креном, тангажом, курсом (направлением).
Для управлениякреном летчик воздействует на ручку управления в поперечном направлении, для управления тангажом – в продольном направлении.
При управлении курсом летчик воздействует на педали.
Для обеспечения автоматического управления курсом, креном, тангажом автопилот имеет три независимых канала, воздействующие на соответствующие органы управления (аналогично летчику):
канал направления – на шаг хвостового винта;
канал крена – на автомат перекоса в поперечном направлении;
канал тангажа – на автомат перекоса в продольном направлении.
Управление высотой полета
При выполнении горизонтальных полетов летчику приходится довольно часто воздействовать на ручку «шаг-газ» для поддержания неизменной высоты полета. Для разгрузки летчика от этой работы в АП предусмотрен канал высоты, воздействующий на общий шаг несущего винта вертолета, рис.3.
В качестве ЧЭ используется корректор высоты, дающий в АП сигнал изменения барометрической высоты полета. В отличие от каналов угловой стабилизации, где одновременно могут работать контуры «вертолет-летчик» (контур 2) и «вертолет-АП» (контур 1), в канале высоты при вмешательстве летчика в управление АП отключается (выключатель В1 разомкнут). В остальном работа контура стабилизации высоты аналогична работе контура угловой стабилизации.
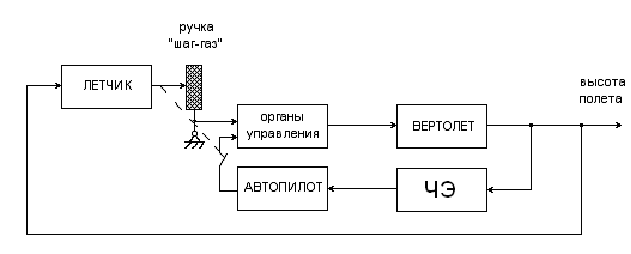
Рис.3Схема включения канала высоты автопилота в систему управления вертолета
Дата добавления: 2017-02-13; просмотров: 2875;
Поиск по сайту
Узнать еще
- L 5.3 управление акциями по стимулированию продаж, в т.ч. размещение
- Автоматизированное управление работой АПГ
- Автоматизированное управление топливоподачей и топливоприготовлением.
- Автоматическое управление периодическими процессами хим. очистки воды.
- Автоматическое управление работой объектов
- Административно-территориальное управление в России. Создание федеральных органов.
- АНТИКРИЗИСНОЕ УПРАВЛЕНИЕ В БАНКЕ
- Антикризисное управление риском

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
