Основы геометро-кинематического синтеза механизмов с высшими кинематическими парами.
В предыдущих лекциях рассматривались задачи синтеза механизмов с низшими парами. Эти пары обеспечивают передачу значительных сил, так как звенья пары обычно соприкасаются по поверхности. Но условие постоянного соприкосновения звеньев по поверхности ограничивает число возможных видов низших пар.
Значительно большие возможностями для воспроизведения почти любого закона движения имеют механизмы с высшими кинематическими парами, так как условие касания взаимодействующих поверхностей звеньев высшей пары по линиям и точкам могут быть выполнены бесчисленным множеством различных поверхностей.
Механизмы с высшими кинематическими парами обладают, по крайней мере, тремя существенными достоинствами в сравнении с механизмами, содержащими только низшие кинематические пары:
· во-первых, они могут воспроизводить любой заданный закон движения теоретически точно;
· во-вторых, для реализации одного и того же закона движения может быть использован более простой по структуре механизм, содержащий меньшее количество звеньев и кинематических пар;
· в-третьих, механизмы с высшими кинематическими парами могут быть менее чувствительными к погрешностям изготовления и монтажа как в отношении точности воспроизведения заданного закона движения, так и в отношении нагрузочной способности.
При воспроизведении возвратного движения можно иметь одну пару сопряжённых профилей (поверхностей). Если же требуется воспроизвести непрерывное движение в одном направлении, то надо иметь несколько последовательно взаимодействующих пар сопряжённых поверхностей, которые располагаются на выступах, называемых зубьями.
К механизмам с высшими кинематическими парами относятся:
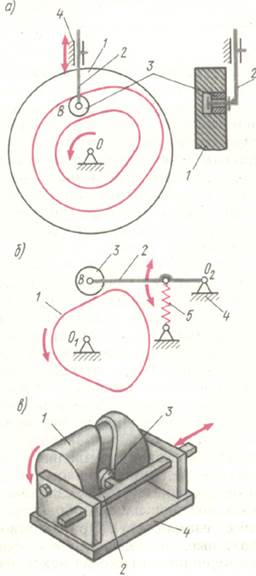
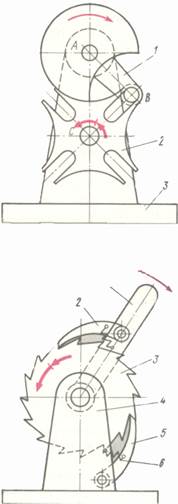
1. Кулачковые механизмы (рис. 13.1)
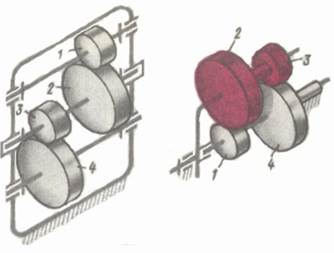
2. Фрикционные механизмы (в том числе и планетарные) (рис. 13.2)
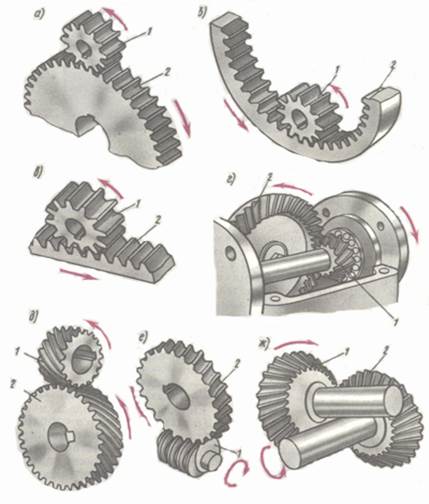
3. Зубчатые передачи с неподвижными осями (рис. 13.3)
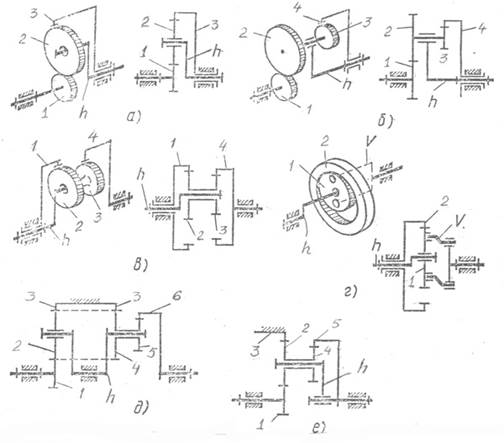
4. Планетарные механизмы, в которых хотя бы одно звено имеет подвижную ось в пространстве (рис. 13.4, а-е)
5. Мальтийские механизмы и другие механизм прерывистого действия (рис. 13.5, а, б)
| |||||||||||
| |||||||||||
| |||||||||||
| |||||||||||
| |||||||||||
| |||||||||||
|
Синтез зацепления состоитв отыскивании сопряжённых поверхностей по заданному закону их относительного движения. Для решения этой задачи используется основная теорема зацепления, устанавливающая связь между геометрией профилей (сопряженных поверхностей) и заданным законом их относительного движения.
Взаимодействующие поверхности звеньев высшей пары, обеспечивающие заданный закон их относительного движения, называется сопряжёнными поверхностями.
|
|


|
|
|
|
|
|



 Теорема:
Теорема:
|

 Сопряжённые поверхности долж-ны быть выбраны так, чтобы в любой точке их контакта общая нормаль к ним была перпендикулярна вектору скорости точки контакта в заданном относительном движении поверх-ностей.
Сопряжённые поверхности долж-ны быть выбраны так, чтобы в любой точке их контакта общая нормаль к ним была перпендикулярна вектору скорости точки контакта в заданном относительном движении поверх-ностей.
В аналитическом виде условие основной теоремы зацепления записывается как условие перпендикулярности векторов:

где  - орт нормали в точке контакта.
- орт нормали в точке контакта.
Теорема доказывается «от противного». Если условие теоремы не выполнено, т.е. общая нормаль n-n к выбранным поверхностям не перпендикулярна относительной скорости Vотн., то имеется составляющая этой скорости, направленная по общей нормали, и, следовательно, происходит либо отрыв одной поверхности от другой, либо вдавливание, что невозможно.
В общем случае контакт поверхностей может происходить в нескольких точках и по линиям (линейчатый контакт). При этом условие основной теоремы зацепления должно быть выполнено во всех точках контакта.
Зацепление, в котором оба звена совершают плоское движение, параллельное одной и той же неподвижной плоскости, называется плоским. Для плоского зацепления вместо сопряжённых поверхностей можно рассматривать сопряжённые профили, т.е. кривые получаемые в сечении сопряжённых поверхностей плоскостью, параллельной плоскости движения.
Мгновенный центр вращения в относительном движении звеньев плоского зацепления принято называть полюсом зацепления. Относительная скорость точки контакта профилей перпендикулярна радиусу-вектору, соединяющему эту точку с полюсом зацепления.
Основная теорема плоского зацепления.
Дата добавления: 2017-02-13; просмотров: 1553;
Поиск по сайту
Узнать еще
- II. ОСНОВЫ МОЛЕКУЛЯРНОЙ ФИЗИКИ И ТЕРМОДИНАМИКИ
- V. ЛОГИЧЕСКИЕ ОСНОВЫ ВЫЧИСЛИТЕЛЬНОЙТЕХНИКИ
- XIV. ОСНОВЫ МАССОПЕРЕДАЧИ
- ІІ.5.2. Основы процесса фракталь-ного расширения квадрата
- Анализ процессов синтеза атомов и ядер
- Анатомо - физиологические основы массажа
- Арифметические основы ЭВМ
- Атомное ядро и основы ядерной энергетики

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
