Влияние избыточных связей на работоспособность и надежность машин.
Как было сказано выше, при произвольных (в некоторых пределах) размерах звеньев механизм с избыточными связями (  ) нельзя собрать без деформирования звеньев. Поэтому такие механизмы требуют повышенной точности изготовления, в противном случае в процессе сборки звенья механизма деформируются, что вызывает нагружение кинематических пар и звеньев значительными дополнительными силами (сверх тех основных внешних сил, для передачи которых механизм предназначен). При недостаточной точности изготовления механизма с избыточными связями трение в кинематических парах может сильно увеличиться и привести к заклиниванию звеньев, поэтому с этой точки зрения избыточные связи в механизмах нежелательны.
) нельзя собрать без деформирования звеньев. Поэтому такие механизмы требуют повышенной точности изготовления, в противном случае в процессе сборки звенья механизма деформируются, что вызывает нагружение кинематических пар и звеньев значительными дополнительными силами (сверх тех основных внешних сил, для передачи которых механизм предназначен). При недостаточной точности изготовления механизма с избыточными связями трение в кинематических парах может сильно увеличиться и привести к заклиниванию звеньев, поэтому с этой точки зрения избыточные связи в механизмах нежелательны.
Что касается избыточных связей в кинематических цепях механизма, то при конструировании машин их следует стремиться устранять или же оставлять минимальное количество, если полное их устранение оказывается невыгодным из-за усложнения конструкции или по каким-либо другим соображениям. В общем случае оптимальное решение следует искать, учитывая наличие необходимого технологического оборудования, стоимость изготовления, требуемые ресурс работы и надежность машины. Следовательно, это весьма сложная задача для каждого конкретного случая.
Методику определения и устранения избыточных связей в кинематических цепях механизмов рассмотрим на примерах.
Пусть плоский четырехзвенный механизм с четырьмя одноподвижными вращательными парами (  рис. 2.15, а) за счет неточностей изготовления (например, вследствие непараллельности осей A и D) оказался пространственным. Сборка кинематических цепей 4, 3, 2 и отдельно 4, 1 не вызывается трудностей, а точки B, B’ можно расположить на оси х. Однако собрать вращательную пару В, образованную звеньями 1 и 2, можно будет, лишь совместив системы координат Bxyz и B’x’y’z’, для чего потребуется линейное перемещение (деформация) точки B’ звена 2 вдоль оси х и угловые деформации звена 2 вокруг осей х и z (показаны стрелками). Это означает наличие в механизме трёх избыточных связей, что подтверждается и по формуле (2.3):
рис. 2.15, а) за счет неточностей изготовления (например, вследствие непараллельности осей A и D) оказался пространственным. Сборка кинематических цепей 4, 3, 2 и отдельно 4, 1 не вызывается трудностей, а точки B, B’ можно расположить на оси х. Однако собрать вращательную пару В, образованную звеньями 1 и 2, можно будет, лишь совместив системы координат Bxyz и B’x’y’z’, для чего потребуется линейное перемещение (деформация) точки B’ звена 2 вдоль оси х и угловые деформации звена 2 вокруг осей х и z (показаны стрелками). Это означает наличие в механизме трёх избыточных связей, что подтверждается и по формуле (2.3):  . Что бы данный пространственный механизм был статически определимый, нужна его другая структурная схема, например изображённая на рис. 2.15, б, где
. Что бы данный пространственный механизм был статически определимый, нужна его другая структурная схема, например изображённая на рис. 2.15, б, где  Сборка такого механизма произойдёт без натягов, поскольку совмещение точек В и В’ будет возможно за счёт перемещения точки С в цилиндрической паре.
Сборка такого механизма произойдёт без натягов, поскольку совмещение точек В и В’ будет возможно за счёт перемещения точки С в цилиндрической паре.
Возможен вариант механизма (рис. 2.15, в) с двумя сферическими парами (  ); в этом случае, помимо основной подвижности механизма
); в этом случае, помимо основной подвижности механизма  появляется местная подвижность
появляется местная подвижность  - возможность вращения шатуна 2 вокруг своей оси ВС; эта подвижность не влияет на основной закон движения механизма и может быть даже полезна с точки зрения выравнивания износа шарниров: шатун 2 может при работе механизма поворачиваться вокруг своей оси за счёт динамических нагрузок. Формула Малышева подтверждает, что такой механизм будет статически определимым:
- возможность вращения шатуна 2 вокруг своей оси ВС; эта подвижность не влияет на основной закон движения механизма и может быть даже полезна с точки зрения выравнивания износа шарниров: шатун 2 может при работе механизма поворачиваться вокруг своей оси за счёт динамических нагрузок. Формула Малышева подтверждает, что такой механизм будет статически определимым:

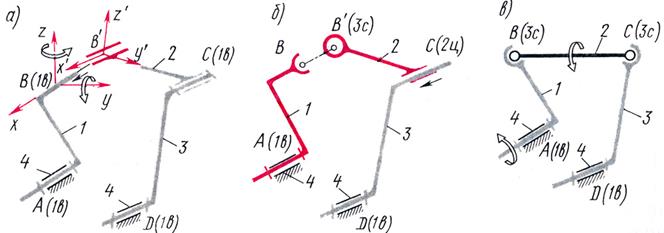
Рис. 2.15
Наиболее простой и эффективный способ устранения избыточных связей в механизмах приборов - применение высшей пары с точечным контактом взамен звена с двумя низшими парами; степень подвижности плоского механизма в этом случае не меняется, поскольку, по формуле Чебышева (при  ):
):

На рис. 2.16, а,б,в дан пример устранения избыточных связей в кулачковом механизме с поступательно движущимся роликовым толкателем. Механизм (рис. 2.16, а) - четырехзвенный (  ); кроме основной подвижности (вращение кулачка 1) имеется местная подвижность (независимое вращение круглого цилиндрического ролика 3 вокруг своей оси); следовательно,
); кроме основной подвижности (вращение кулачка 1) имеется местная подвижность (независимое вращение круглого цилиндрического ролика 3 вокруг своей оси); следовательно,  . Плоская схема избыточных связей не имеет (механизм собирается без натягов,
. Плоская схема избыточных связей не имеет (механизм собирается без натягов,  ). Если вследствие неточностей изготов-ления механизм считать пространственным, то при линейном контакте ролика 3 с кулачком 1 по формуле Малышева при
). Если вследствие неточностей изготов-ления механизм считать пространственным, то при линейном контакте ролика 3 с кулачком 1 по формуле Малышева при  получим
получим  , но при определенном условии. Кинематическая пара цилиндр - цилиндр (рис. 2.16, 6) при невозможности относительного поворота звеньев 1, 3 вокруг оси z была бы трехподвижной парой. Если же такой поворот вследствие неточности изготовления имеет место, но мал, и практически сохраняется линейный контакт (при нагружении пятно контакта по форме близко к прямоугольнику), то данная
, но при определенном условии. Кинематическая пара цилиндр - цилиндр (рис. 2.16, 6) при невозможности относительного поворота звеньев 1, 3 вокруг оси z была бы трехподвижной парой. Если же такой поворот вследствие неточности изготовления имеет место, но мал, и практически сохраняется линейный контакт (при нагружении пятно контакта по форме близко к прямоугольнику), то данная
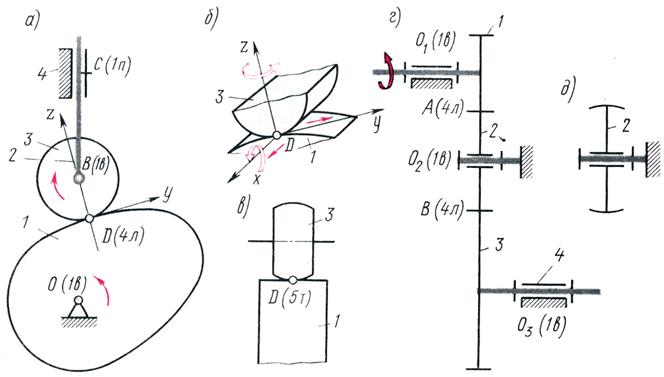 |
кинематическая пара будет четырехподвижной, следовательно,
 и
и 
Рис.2.17
Снижая класс высшей пары путем применения бочкообразного ролика (пятиподвижная пара с точечным контактом, рис. 2.16, в), получим при и  - механизм статически определимый. Однако при этом следует помнить, что линейный контакт звеньев, хотя и требует при повышенной точности изготовления, позволяет передать большие нагрузки, чем точечный контакт.
- механизм статически определимый. Однако при этом следует помнить, что линейный контакт звеньев, хотя и требует при повышенной точности изготовления, позволяет передать большие нагрузки, чем точечный контакт.
На рис.2.16, г, д дан другой пример устранения избыточных связей в зубчатой четырехзвенной передаче (  , контакт зубьев колес 1, 2 и 2, 3 - линейный). В этом случае, по формуле Чебышева,
, контакт зубьев колес 1, 2 и 2, 3 - линейный). В этом случае, по формуле Чебышева,  - плоская схема избыточных связей не имеет; по формуле Малышева,
- плоская схема избыточных связей не имеет; по формуле Малышева,  - механизм статически неопределимый, следовательно, потребуется высокая точность изготовления, в частности для обеспечения параллельности геометрических осей всех трех колес.
- механизм статически неопределимый, следовательно, потребуется высокая точность изготовления, в частности для обеспечения параллельности геометрических осей всех трех колес.
Заменяя зубья промежуточного колеса 2 на бочкообразные (рис. 2.16, д), получим  статически определимый механизм.
статически определимый механизм.
Дата добавления: 2017-02-13; просмотров: 2896;
Поиск по сайту
Узнать еще
- II. Физический и моральный износ машин.
- III. Старение и усталость. Вибрация. Коррозия деталей машин. Краткие сведения по теории трения. Виды трения. Основные требования и определения
- IV. Влияние катализатора на скорость реакции
- IС класс — блокаторы натриевых каналов, имеющие различное влияние на ЭРП
- Автомобили и Их Влияние на Чувство Территории
- Алкоголь и его влияние на физическое и психическое здоровье человека. Профилактика
- Аморфные и кристаллические тела. Анизотропия кристаллов. Классификация кристаллов по типу связей. Дефекты в кристаллах. Жидкие кристаллы.
- АНАЛИЗ ВЗАИМОСВЯЗЕЙ КАЧЕСТВЕННЫХ ПРИЗНАКОВ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
