Каким бы не был механизм машины он всегда состоит только из звеньев и кинематических пар.
Условия связи, налагаемые в механизмах на подвижные звенья, в теории машин и механизмов Принято называть кинематическими парами.
Кинематической паройназывается подвижное соединение двух соприкасающихся звеньев, обеспечивающее их определенное относительное движение.
В табл. 2.1 приведены названия, рисунки, условные обозначения наиболее распространенных на практике кинематических пар, а также произведена их классификация.
Звенья при объединении их в кинематическую пару могут соприкасаться между собой по поверхностям, линиям и точкам.
Элементами кинематической парыназывают совокупность Поверхностей, линий или точек, по которым происходит подвижное соединение двух звеньев и которые образуют кинематическую Пару. В зависимости от вида контакта элементов кинематических пар различают высшие и низшиекинематические пары.
Кинематические пары, образованные элементами в виде линии или точки,называются высшими.
Кинематические пары, образованные элементами в виде поверхностей, называются низшими.
Чтобы пара существовала, элементы входящих в нее звеньев должны находиться в постоянном контакте, Т.е. быть замкнутыми. Замыкание кинематических пар может быть геометрически или силовым, Например, с помощью собственной массы, пружин и т.п..
Прочность, износостойкость и Долговечность кинематических пар зависят от их вида и конструктивного исполнения. Низшие пары более износостойкие, чем высшие. Это объясняется тем, что в низших Парах контакт элементов пар происходит по поверхности, а следовательно, при одинаковой нагрузке в ней возникают меньшие удельные давления, чем в высшей. Износ, при прочих равных условиях, Пропорционален удельному давлению, а поэтому низшие Пары изнашиваются Медленнее, Чем высшие. Поэтому с целью уменьшения износа в машинах предпочтительнее использование низших пар, однако часто применение высших кинематических пар позволяет значительно упростить структурные схемы машин, что снижает их Габариты и упрощает конструкцию. Поэтому правильный выбор кинематических пар является сложной инженерной задачей.
Кинематические Пары разделяют также по числу степеней свободы (подвижности), которые она предоставляет соединенным посредством ее звеньям, или по числу условий связей (класс пары), налагаемых парой на относительное движение соединяемых звеньев. При использовании такой классификации разработчики машин получают сведений о возможных относительных движениях звеньев и о характере взаимодействия силовых факторов между элементами пары.
Свободное звено, находящееся в общем случае в М - мерном пространстве, Допускающем П видов простейших движений, обладает числом степеней свобода! (Н) или W - подвижно.
Так, если звено находится в трехмерном пространстве, допускающем шесть видов Простейших движений - три вращательных и три поступательных вокруг и вдоль осей X, V, Z, то говорят, что оно обладает шестью степенями свободы или имеет шесть обобщенных координат, или шестиподвижно. Если звено находится в двухмерном пространстве, допускающем три вида простейших движений - одно вращательное вокруг Z и два поступательных вдоль осей X и Y, то говорят, что оно имеет три степени свободы, или три обобщенные координаты, или оно трехподвижно и т. д..
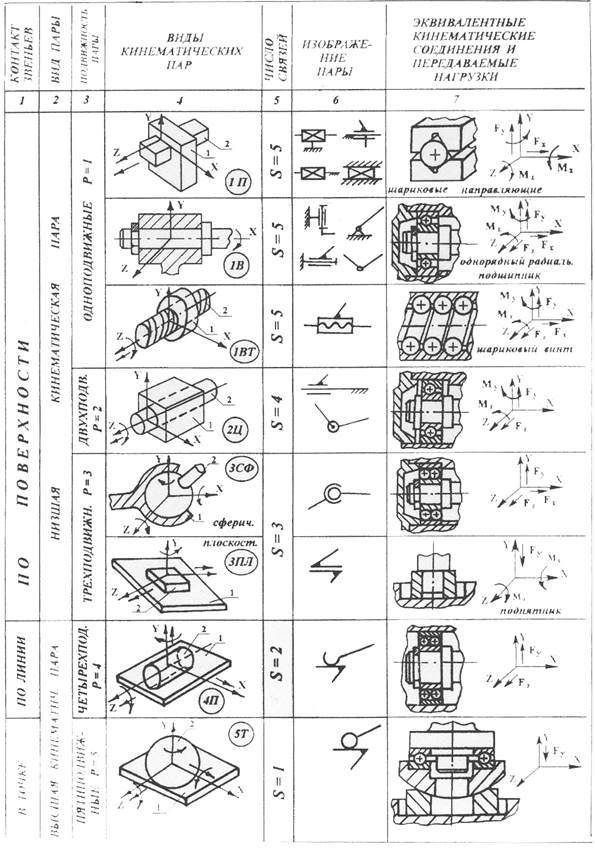
Таблица 2.1
При объединении звеньев с помощью кинематических пар они лишаются степеней свободы. Значит, кинематические пары налагают на соединяемые ими звенья связи числом S.
В зависимости от числа степеней свободы, которым обладают в относительном движении звенья, объединенные в кинематическую пару, определяют подвижность пары (W=Н). Если Н - число степеней свободы звеньев кинематической пары в относительном движении, to подвижность пары определится следующим образом:

где П - подвижность пространства, в котором .существует рассматриваемая пара; S - число налагаемых парой связей.
Следует заметить, что подвижность пары W, определенная по (2.1), зависит не от вида пространства, в котором она реализуется, а только от конструкции.
Например, вращательная (поступательная) (см, табл. 2.1) пара как в шести-, так и в трехподвижном пространстве, все равно останется одноподвижной, в первом случае на нее будет наложено 5 связей, а во втором случае - 2 связи, и, значит, будем иметь, соответственно:
для шестиподвижного пространства:

для трехподвижного пространства:

Как видим, подвижность кинематических пар не зависит от характеристик пространства, что является преимуществом данной классификации. Напротив, часто встречающееся деление кинематических пар на классы страдает тем, что класс пары зависит от Характеристик пространства, а значит, одна и та же пара в разных пространствах имеет разный класс. Это неудобно для практических целей, значит, такая Классификация кинематических пар нерациональна, поэтому ее лучше не применять.
Можно подобрать такую форму элементов пары, чтобы при одном независимом простейшем движений возникало второе - зависимое (производное). Примером такой кинематической пары является винтовая (табл. 2.1). В этой паре вращательное движение винта (гайки) вызывает поступательное его (ее) перемещение вдоль оси. Такую пару следует отнести к одноподвижной, Так как в ней реализуется всего одно независимое простейшее Движение.
Дата добавления: 2017-02-13; просмотров: 1761;
Поиск по сайту
Узнать еще
- CIH — газораспределительный механизм с распределительным валом в головке блока цилиндров
- I. Судовождение, основанное только на лоцманском методе.
- II. Абсолютное пространство по самой своей сущности, безотносительно к чему бы то ни было внешнему, остается всегда одинаковым и неподвижным».
- II. Принцип действия и режимы работы синхронной машины
- III. Механизмы регуляции количества ферментов
- TActionList - механизм действий
- XXXV. ПОДЪЕМНЫЕ МАШИНЫ И ПРОХОДЧЕСКИЕ ЛЕБЕДКИ
- Абсорбционные холодильные машины

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
