Структура и виды задач судовой автоматики
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ.
Основные понятия и определения.
Широкое внедрение автоматизации судовых энергетических установок на морском и речном транспорте ставит перед инженерно-техническим персоналом, эксплуатирующим судовую технику, новые задачи и предъявляет высокие требования к квалификации моряков. Это обстоятельство требует более высокой подготовленности судовых механиков и электромехаников, способных не просто эксплуатировать автоматизированные объекты, но и повышать технико-экономическую эффективность работы судовых энергетических установок путем применения практических и теоретических методов оптимизации процессов регулирования и управления сложными объектами.
Слова «автоматизация» и «автоматика» происходят от греческого слова «автоматос», что означает «самодействующий».
В настоящем разделе мы будем рассматривать в основном теорию и технику систем автоматического регулирования (САР).
Считается, что первым автоматическим регулятором был регулятор уровня воды в котле паровой машины, изобретенный и изготовленный И.И. Ползуновым в 1765 г. В этой системе поплавок (измерительное устройство) непосредственно перемещает задвижку на входе жидкости в бак. Уровень является здесь регулируемым параметром, задвижка - регулирующим органом, поплавок с приводом к задвижке – регулятором, а котел – объектом регулирования. Если увеличивается отвод жидкости из котла, то поплавок, опускаясь, открывает задвижку, увеличивает подвод жидкости в котел и уровень воды автоматически восстанавливается.
Автоматизация судовых энергетических установок (СЭУ) – важнейшее направление технического прогресса в мировом судостроении. При этом решился вопрос вывода машинной команды из машинно-котельного отделения (МКО) судна, решился вопросы перехода к безвахтенному обслуживанию судовых технических средств (СТС) и сокращению общей численности технического персонала при передаче функций маневрирования СЭУ непосредственно в руки судоводителя, обеспечиваются постоянный контроль за работой СТС, сигнализация и защита судовых объектов.
В зависимости от объема средств автоматизации Морской Регистр РФ присваивает судну знак автоматизации А1 или А2, что отражается в квалификационном свидетельстве судна.
Знак А2 присваивается, если объем автоматизации СЭУ достаточен для ее безопасной работы при отсутствии постоянной вахты в МКО, но при наличии вахты на центральном посту управления (ЦПУ).
При этом должны быть обеспечены возможности дистанционного запуска (останова) главных и вспомогательных двигателей (ГД и ВД), изменение режима работы всех механизмов МКО. Суда со знаком А2 в символе класса должны быть оборудованы системами автоматизации (СА) в объеме, позволяющем проводить дистанционное автоматическое управление (ДАУ) с мостика, ходовой рубки главными механизмами и движителями. Главное, безопасность эксплуатации судна должна быть не меньшей, чем на судах с вахтой в МКО.
Знак автоматизации А1 предполагает нормальную работу всех механизмов МКО без местного обслуживания и дистанционного контроля из ЦПУ, а только из ходовой рубки.
ДАУ – управление, с помощью которого можно задавать желаемый режим работы механизма, воздействуя на элемент управления так, что в дальнейшем механизм самостоятельно выполняет все промежуточные действия по заложенному в системе алгоритму, обеспечивая заданный режим.
АПС (аварийно-предупредительная сигнализация) обеспечивает сигнализацию о достижении контролируемыми параметрами установленных предельных значений и об изменении нормального функционирования. Сигнализация может быть звуковой (ревун, колокол громкого боя, звонок) и световой.
Система индикации (СИ) обеспечивает получение информации о величинах, определенных физических параметров или об изменении определенных состояний механизмов.
Система автоматизации (СА) – это совокупность элементов и устройств, предназначенная для создания конструктивного и функционального целого и для выполнения определенных функций в области управления, контроля и защиты судовых технических средств (СТС). Например, система ДАУ, включает в себя элементы передачи сигнала задания на дистанцию, автоматический регулятор частоты и сам управляемый механизм с системой АПС.
Устройство автоматизации (УА) – часть СА, составленная из элементов, соединенных в одно конструктивное и функциональное целое. Например, автоматический регулятор частоты.
Элемент СА – это самостоятельный в конструктивном отношении прибор (устройство), используемый в СА, например, реле (комбинированное реле давления или температуры), датчик, сигнализатор, усилитель, исполнительный механизм (ИМ).
Автоматизированными объектами (АО) могут быть: двигатель, компрессор, котел, судовая система или другие механизмы, оборудованные системами автоматического регулирования, управления, контроля и защиты.
Регулятор – это устройство, воспринимающее отклонение регулируемого параметра от заданного значения и воздействующее на процесс в сторону его восстановления.
Регулируемый параметр представляет собой показатель, характеризующий состояние происходящего в объекте регулирования процесса, например, частота вращения, температура воды (масла), давление пара, уровень в барабане котла и т.д.
Датчик – источник информации, выходной сигнал которого соответствует
текущему значению контролируемого параметра объекта. Датчик обеспечивает аналоговый непрерывный характер сигнала.
Сигнализатор – это источник информации, выходной сигнал которого дискретно (прерывисто) изменяется при достижении контролируемым параметром заданного значения.
Структура и виды задач судовой автоматики
Система автоматического регулирования (САР) обеспечивает работу механизма (агрегата) по заданному режиму с сохранением необходимых значений параметров, характеризующих этот режим. Сам агрегат является при этом регулируемым объектом (О). САР состоит как минимум из объекта и регулирующего устройства (автоматического регулятора (Р)). Воздействие на объект Р оказывает через регулирующий орган (РО), который изменяет подвод или отвод энергии (gn ,gот) к О. Например, РО изменяет подачу топлива, подвод пара, проходное сечение и т.п.
Параметр, который поддерживается САР в заданных пределах, называется регулируемым параметром. При этом регулируемый параметр конкретизирует назначение САР, например, САРч – система автоматического регулирования частоты, САРТ – температуры, САРд – давления.
Причина, заставляющая О выйти из заданного режима, называется возмущением. Характерными видами возмущения могут быть «толчок», «скачок», гармонические колебания и т.п. На рис.5.1 представлена структурная схема классической САР. Под структурной схемой понимается простейшее представление элементов СА в виде прямоугольников, окружностей, стрелок и других обозначений, в том числе буквенных.
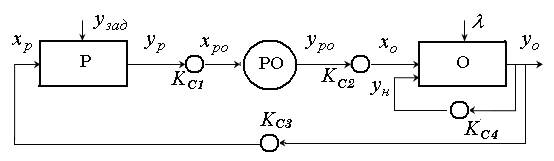
Рисунок 5.1.. Структурная схема САР
Функциональная схема – это упрощенное изображение САР или ее элементов на уровне эскиза или чертежа.
Стрелки на структурной схеме указывают направление возмущения и отработки элементами САР на эти возмущения. В САР имеются обратные связи. Но обратная связь, проходящая через регулятор, называется главной обратной связью. Так, на рис. 5.1 главная обратная связь проходит от выходной координаты объекта y0, через кинематическую пару с коэффициентом статической передачи Кс3, через регулятор Р, кинематическую пару с Кс1, , регулирующий орган РО и кинематическую пару с Кс2 на входную координату объекта х0.
Дополнительная обратная связь проходит от выходной координаты О через кинематическую пару Кс4, на координату входа в объект yн.
Из структурной схемы САР следует, что она является замкнутой системой звеньев направленного (детектирующего) действия. На структурной схеме показаны входные и выходные координаты звеньев или в абсолютном (размерном), или в относительном (безразмерном) выражении. Желательно вводить безразмерные выражения, которые обозначаются прописными буквами.
Объект имеет координаты входа (х0) и нагрузки (λ), координату выхода (хр) и (yзад), а координата выхода (yр). Координата λ указывает, что объект работает на потребитель. У регулятора координату yзад называют координатой настройки регулятора, определяющей выбор его статической характеристики и, следовательно, диапазон работы.
Кинематические пары (маленькие окружности) могут быть различного типа, например, шестеренная передача с коэффициентом статической передачи:
 ,
,
рычажная передача:

и т.п. В любом случае коэффициент статической передачи – это отношение выходной координаты к входной.
Каждое звено САР имеет свой коэффициент статической передачи. Например, для регулятора:

Если размерности входной и выходной координаты различны, то выражение приводят к безразмерному виду. Так, yр имеет размерность [м], хр - [с-1] и
 .
.
В выражение вводят номинальные паспортные параметры элемента, определяющие весь диапазон его изменения.
Кинематические пары могут иметь иной физический смысл, например,
читается как  ,
,
 -
-
через y2 проходит отрицательная связь - y2 и результат получится как y = y1 – y2.
САР может находиться в состоянии равновесия или в состоянии переходного процесса (статика и динамика регулирования). Вследствие внесенного в САР возмущения происходит отработка всех звеньев системы на это возмущение. Структурная схема наглядно отражает участие и роль каждого звена и элемента в данном процессе. При изучении САР рассматривают отдельно свойства всех звеньев, образующих систему как в равновесных режимах (статика), так и на переходных режимах (динамика). Зная статику и динамику каждого звена САР, можно выполнять анализ (разложение на простейшие элементы) и синтез (структурирование и создание) сложных систем.
Следует особо выделить вопрос об устойчивости САР и ее элементов. Если после переходных процессов, вызванных внесенным в САР возмущением, наступает равновесный режим, то говорят, что САР устойчива. Если возникает расходящийся процесс, то САР определяют как неустойчивую. В случае вывода системы на режим незатухающих периодических колебаний считают, что САР является консервативной системой.
На практике реализуются три вида задач регулирования.
Статическое регулирование:
а) Статическое регулирование, т.е. регулирование с определенной ошибкой, которую называют степенью неравномерности регулирования δ или статизмом САР (рис. 5.2). В некоторых случаях ошибку регулирования называют наклоном статической характеристики.
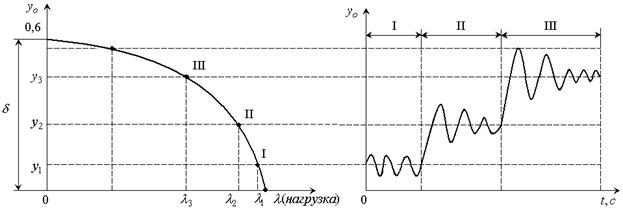
Рисунок 5.2. Статическое регулирование
При этом зависимость y0 = ƒ(λ), полученную для САР на рис.5.1, при работе объекта на регуляторе с фиксированной координатой задания (yзад = const) называют статической характеристикой САР или регуляторной характеристикой. При изменении режима нагружения (в данном случае путем последовательного динамического наброса нагрузки от λ1 до λ3 после некоторого переходного процесса с динамическим забросом параметра y0 устанавливается равновесный режим при y1 , y2 и y3, соответственно. Регулируемый параметр при изменении нагрузки не восстанавливается, имеет место ошибка регулирования. В данном случае при статическом или динамическом переходе от нулевой нагрузки до полной (λ=1) y0 изменится на величину 0,6 (или на 60%). Степень неравномерности статической характеристики САР (или ее статизм, или ее наклон к оси регулируемого параметра, или остаточная ошибка регулирования) будет равна δ = 60%.
б) Астатическое регулирование, т.е. ошибка регулирования равна нулю при любом изменении нагрузки (рис. 5.3).
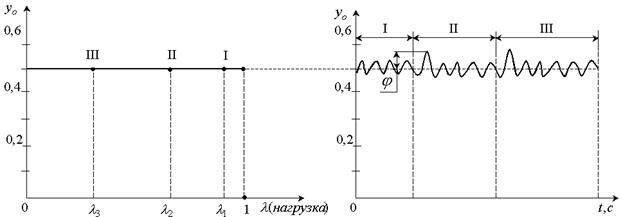
Рисунок 5.3. Астатическое регулирование
Наклон статической характеристики САР, выраженный величиной ее проекции на ось y0, равен нулю. По сути это частный случай статического регулирования. Это точное регулирование при степени неравномерности характеристики  . При переходе с одного режима нагружения на другой имеет место переходный процесс с динамическим забросом регулируемого параметра
. При переходе с одного режима нагружения на другой имеет место переходный процесс с динамическим забросом регулируемого параметра  .
.
1.Программное регулирование (рис. 5.4).
| ||
| Нагрузка | Значение 
| |
I (  ) )
| 
| |
II (  ) )
| 
| |
III (  ) )
| 
| |
| - - - | - - - | |
| - - - | - - - | |
X (  ) )
| 
|
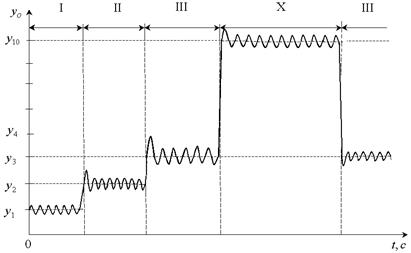
Рисунок 5.4. Программное регулирование
Программа задается функцией или таблично. Реализуется на базе микропроцессорных комплектов (МПК) в современных системах автоматизации.
1.Системы позиционного (релейного) регулирования (рис. 5.5).
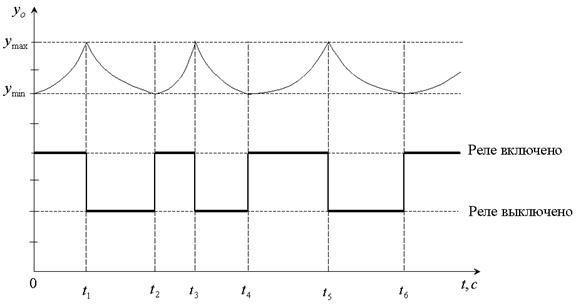
Рисунок 5.5. Система позиционного регулирования
Например, в САРд (системе автоматического регулирования давления пара во вспомогательном котле с электрическим подогревом) регулируемый параметр давление пара  поддерживается в рабочем диапазоне
поддерживается в рабочем диапазоне  путем включения – выключения электрического нагревателя. Темп возрастания – падения давления определяется величиной потребления пара (нагрузкой
путем включения – выключения электрического нагревателя. Темп возрастания – падения давления определяется величиной потребления пара (нагрузкой  ), в результате чего скважность подачи тока
), в результате чего скважность подачи тока  ,
,  и
и  различна во времени. САР обеспечивает поддержание давления пара в пределах заданной степени неравномерности статической характеристики САРд
различна во времени. САР обеспечивает поддержание давления пара в пределах заданной степени неравномерности статической характеристики САРд
 ,
,
где yо ном - номинальное (паспортное) давление пара.
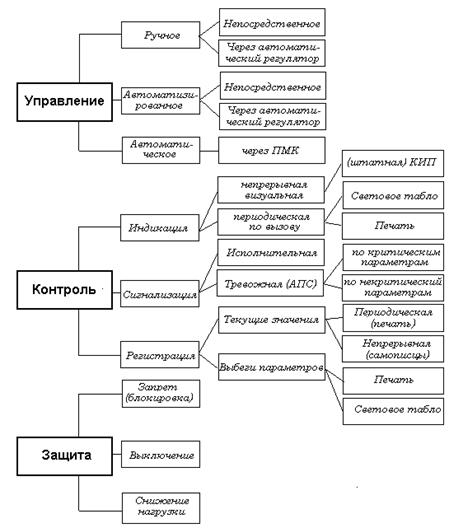
Рисунок 5.6. Структура и виды управления, контроля и защиты
Если ось ординат имеет безразмерный вид, то δ = ymax - ymin , о.е., или δ = (ymax - ymin)∙100%.
В целом вопросы автоматизации связаны с осуществлением функций управления, контроля и защиты СТС, что в обобщенном виде наглядно представлено на рис. 5.6.
В отличие от САР, представленной на рис.5.1, система автоматизированного управления (САУ) предполагает внедрение интеллектуального интерфейса между пользователем, программным устройством и САР (рис. 5.7).
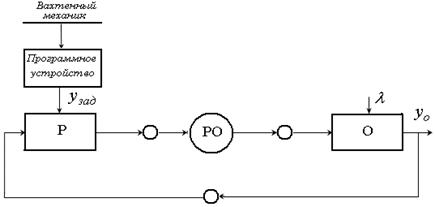
Рисунок 5. 7. Структурная схема автоматизированного управления
Система автоматического управления предполагает, в отличие от автоматизированного управления, введение многочисленных обратных связей от объекта к программному устройству с исключением роли вахтенного с его воздействием на координату режима yреж программного устройства (рис. 5.8).
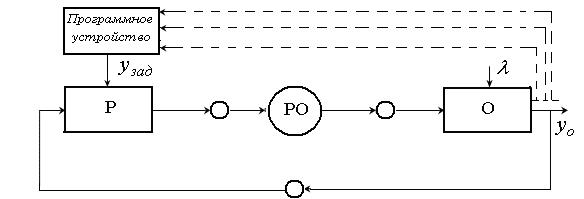
Рисунок. 5.8. Структурная схема автоматического управления
Системы автоматизации СЭУ должны удовлетворять следующим основным требованиям Морского Регистра судоходства РФ:
1. Повышение технической и эксплуатационной эффективности использования судов, безопасности плавания при улучшении условий труда и быта экипажа.
2. Повышение количественных показателей надежности СТС, связанных с возрастанием отрыва судов от береговых баз:
· срок службы систем автоматизации без регулировок и разборки не менее 7000 ч, а общий ресурс работы должен быть равен ресурсу объекта;
· СА должны нормально функционировать при крене до 20° (при длительном крене - 15°) и дифференте до 10°.
· СА должны нормально функционировать в условиях вибрации с ƒ = 20 Гц при амплитуде 0,5 мм и выдерживать удары с ускорением до 70 м/с2 при tМКО до 60°С и влажности воздуха до 95%;
· СА должны соответствовать Правилам приемки Регистра РФ, наблюдения и освидетельствования;
· исполнение должно быть искро- и взрывобезопасным и защищенным от влаги, паров масла и топлива;
· в СА должна предусматриваться возможность ручного вмешательства в процесс управления;
· для питания СА должен предусматриваться резервный источник, включаемый в работу автоматически за  с;
с;
· усилия на задающих органах СА до 30…50 Н;
· технические требования к характеристикам и показателям СА индивидуальны для каждой системы и объекта, исходя из характера и условий работы согласно государственным стандартам или ведомственной нормативной документации;
· СА должны обеспечивать алгоритм управления согласно с инструкциями, т.е. должны обеспечивать технически правильный алгоритм функционирования (с исключением опасных перегрузок и аварийных состояний);
· для СА должны быть оговорены требования по точности задаваемого режима, времени отработки задания и т.д.
Если САР (САУ) сама определяет наивыгоднейшее для данных условий эксплуатационное значение координаты yзад и способна перенастраиваться, то ее называют самонастраивающейся (адаптивной) и оптимизирующей системой. Применение микропроцессорных САУ в этом плане является перспективным.
Следует особо остановиться на способах регулирования процессов в судовой автоматике.
И з в е с т н ы следующие способы регулирования:
1. регулирование по отклонению регулируемого параметра от заданной величины, в теории регулирования этот способ известен как принцип И.Ползунова – Д. Уатта;
2. регулирование по скорости изменения регулируемого параметра (способ братьев Сименс);
3. регулирование по ускорению регулируемого параметра;
4. регулирование по изменению нагрузки (способ Понселе).
На практике реализуется принцип Ползунова – Уатта, реже в совокупности с 3-им и 4-ым способами. Самостоятельно 2, 3 и 4-й способы не применяются.
Дата добавления: 2019-09-30; просмотров: 1519;
Поиск по сайту
Узнать еще
- I. Государственный бюджет и его структура. три состояния государственного бюджета.
- I. Задачи Единой всероссийской спортивной классификации
- I. Определение и структура методов обучения.
- I. Определение, виды радиоактивности, радиоактивные семейства
- I. Социальная структура дореволюционной России
- I. СТРУКТУРА СОВРЕМЕННЫХ НАЛОГОВЫХ СИСТЕМ.
- II. Виды ионизирующих излучений и единицы измерения ИИ
- II. Социальная структура советской России

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
