Редукторы для привода двух соосных винтов
На двигателях мощностью более 6000 л.с. применяются соосные винты, вращающиеся в разные стороны, так как в этом случае использование одиночного винта с обеспечением его высокого КПД становится практически невозможным.
Но применение соосных винтов ведет к усложнению конструкции редукторов, усложнению и утяжелению самих винтов и систем управления ими.
Принципиально для соосных винтов могут применяться простые, планетарные, комбинированные и дифференциальные редукторы.
Простые редукторы для привода соосных винтов практического применения не получили из-за больших диаметральных размеров. Кроме того, у такого редуктора усложняется корпус и возникают затруднения с размещением подшипников, получается большая масса редуктора и значительно возрастают потери на трение.
Простая передача может использоваться только в качестве второй ступени комбинированного редуктора для привода двух соосных винтов (рис3.7, а).
Комбинированные редукторы, в которых привод заднего винта 5 осуществляется через простую двухступенчатую передачу, а переднего винта 6 через простую и планетарную (рис. 3.7, б) ввиду большой сложности, больших размеров и массы, также широкого распространения не получили.
Рис.3.7. Схемы комбинированных редукторов для привода двух соосных винтов
Дифференциальный редуктор для двух соооных винтов можно получить из планетарного редуктора (рис. 3.4,б), обеспечив свободу вращения неподвижной шестерни 4 и нагрузив ее полезным сопротивлением (задним винтом).
Передаточное число такого редуктора составит
Здесь и далее, знак плюс относится к переднему винту, а знак минус к заднему винту.
Дифференциальный редуктор в отличие от планетарного имеет две степени свободы, а соотношение скоростей вращения ведомых валов (валов винтов) зависит от соотношения величин сопротивлений лопастей винтов.
Дифференциальный редуктор для привода двух соосных винтов, стоящий на мощном турбовинтовом двигателе (рис. 3.8,б), состоит из двух центральных ведущих шестерен внешнего зацепления 1, трех сателлитов с венцами 2 и 3 и центральной шестерни внутреннего зацепления 4. Сателлиты размещены на осях водила 5. Передний винт 6 приводится во вращение водилом, а задний 7 — центральной ведомой шестерней внутреннего зацепления.
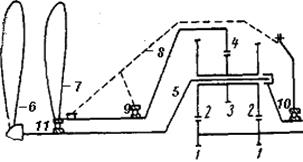
Рис.3.8. Схема дифференциального редуктора
для привода двух соосных винтов
Как известно, передаточное число такого редуктора определяется по формуле
 (1)
(1)
Из этой формулы следует, что кинематический эффект (передаточное число i) у дифференциального редуктора с двухвенечными сателлитами, состоящими из двух шестерён 2 и 3 выше, чем у простого дифференциального редуктора с одновенечными сателлитами и значительно выше, чем у планетарного. Передаточное число редуктора с двухвенечными сателлитами может достигать значения i= 22 ...25.
Соотношение крутящих моментов передаваемых от вала двигателя на передний и задний винт определится
 (2)
(2)
Из уравнения (1) получим
 (3)
(3)
Подставим в (2) выражение (3)
 (4)
(4)
Таким образом, отношение моментов передаваемых на передний и задний винт не зависит от скоростей звеньев внутри редуктора, а зависит только от передаточного числа редуктора i.
По абсолютному значению момент, передаваемый на передний винт  всегда больше момента передаваемого на задний винт
всегда больше момента передаваемого на задний винт  на величину момента подводимого от вала двигателя к редуктору
на величину момента подводимого от вала двигателя к редуктору  .
.
Поэтому при использовании редукторов данной схемы, в ТВД с осевым выходом газов из реактивного сопла, узлы крепления двигателя к самолёту воспринимают крутящий момент равный крутящему моменту вала двигателя , а воздушный поток за задним винтом всегда закручен.
Найдём соотношение мощностей подводимых на передний и задний винт
где  и
и  – числа оборотов переднего и заднего винтов соответственно.
– числа оборотов переднего и заднего винтов соответственно.
Для обеспечения одинакового числа оборотов переднего и заднего винтов в данном редукторе необходимо обеспечить следующее соотношение мощностей переднего и заднего винтов
Для передачи одинаковой мощности на передний и задний винты необходимо, чтобы они вращались с разными угловыми скоростями. Соотношение чисел оборотов для переднего и заднего винтов из условия  определится
определится

Дифференциальный редуктор по сравнению с редукторами других схем имеет меньшие габариты и массу, и более высокий КПД (до 0,992) вследствие меньших потерь на трение в зацеплениях. Кроме того, в таком редукторе корпус 8 не нагружается крутящим моментом (звенья ходовой части не имеют связи с корпусом) и нагрузки на подшипники от центробежных сил невелики (водило вращается с малым числом оборотов, равным числу оборотов переднего винта).
Но при создании таких редукторов встречаются трудности в размещении подшипников ведомых валов (валов винтов). Обычно вал заднего винта (рис.3.8.) устанавливают на двух подшипниках 9 и 10 в корпусе редуктора, а вал переднего винта — на одном подшипнике 11, размещенном во втулке заднего винта.
Передача силы тяги от обоих винтов на корпус осуществляется обычно через радиально-упорный шариковый подшипник внешнего вала. В этом случае сила тяги переднего винта передается через радиально-упорный шариковый подшипник, размещенный во втулке заднего винта.
К недостаткам дифференциального редуктора с двумя степенями свободы относятся также:
-потери энергии, связанные с закруткой потока за винтами;
- наличие реактивного момента;
-различная мощность винтов при одинаковой скорости вращения;
-сложность осуществления автоматического управления винтами.
Замкнутый дифференциальный редуктор, имеющий одну степень свободы, освобожден от ряда недостатков, свойственных дифференциальному редуктору с двумя степенями свободы.
Механизм замкнутого дифференциального редуктора можно получить из дифференциального механизма с двумя степенями свободы путем наложения связи между двумя его главными звеньями.
Замыкание сателлита (рис.3.9, а) приводит к образованию простой планетарной передачи, при этом габариты редуктора существенно увеличиваются, вследствие чего такая схема не применяется.
Замыкание между ведущим звеном (ведущим валом) и валом заднего винта (рис.3.9,6) обеспечивает передачу мощности двумя потоками и тем самым — разгрузку элементов редуктора. Мощность, передаваемая через звено замыкания, при этом равна.

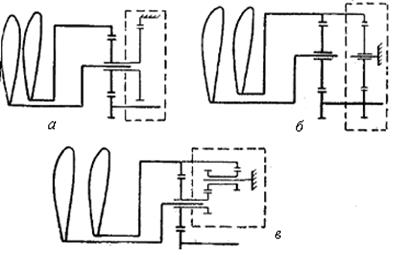
Рис.3.9. Схемы замкнутых дифференциальных редукторов для привода соосных винтов (пунктиром очерчено звено замыкания)
Однако габариты такого редуктора также получаются большими. Для получения меньших габаритов отдают предпочтение схеме с замыканием через валы переднего и заднего винтов (рис.3.9,в). Но в этом случае действуют большие усилия на оси замыкания и зубья шестерен.
Дата добавления: 2019-09-30; просмотров: 2076;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- DC-AC преобразователи. Двухактный инвертор.
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- I2C (Inter-Integrated Circuit) или двухпроводный интерфейс
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Здания для проживания людей
- III. Тесты для самоконтроля студентов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
