Общая задача и общее представление схемы системы управления
Весь процесс управления может быть условно разбит на 5 этапов, каждый из этапов имеет значение для решения практической задачи управления:
- Выбор цели управления (выбор элемента (звена) системы, к которому будут приложены усилия по управлению всей системой или ее частью)
- Составление задачи управления системой (составление алгоритма управления)
- Расчет задания для задающего устройства (входных параметров)
- Определение ошибки управления (разницы между заданными и фактическими параметрами, зависящими от величины и характера внешнего возмущения)
- Непосредственное решение задачи управления, состоящее в практической реализации функциональных особенностей объекта управления
Согласно указанным этапам процесса управления представим условную общую схему реализации системы управления, изображенную на рисунке 10.
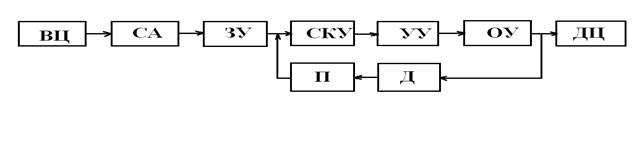 Рис. 10. Условная общая схема реализации системы управления.
Рис. 10. Условная общая схема реализации системы управления.
ВЦ – выбор цели (задачи), СА – составление алгоритма, ЗУ – задающее
устройство, СКУ – сравнивающее корректирующее устройство, УУ –
управляющее устройство, ОУ – объект управления, ДЦ – достижение цели, Д –
датчик, П – преобразователь
В представленной схеме, после выбора цели (ВЦ) и составления алгоритма управления (СА) с задающего устройства (ЗУ) подается сигнал на вход сравнивающего корректирующего устройства (СКУ), на другой вход которого с датчика (Д) через преобразователь (П) подается ошибка отклонения заданного параметра сигнала от фактического. Преобразователь преобразовывает значения величин, поступивших с датчика, в электрические единицы измерения, для сравнения или суммирования их в СКУ.
С выхода СКУ величина входного сигнала, скорректированная с учетом отклонения, подается на управляющее устройство (УУ), которое, в свою очередь преобразовывает сигнал в вид, понятный для объекта управления. В результате на выходе объекта управления, система, реализуя свои возможности, достигает цели (ДЦ), т.е. выполняет поставленную задачу.
Схематическое изображение изменения входных и выходных параметров сигнала в сравнивающем корректирующем устройстве (СКУ) представлено на рисунке 11.
Рис. 11. Схема процесса в СКУ Х – входной сигнал, Y – выходной сигнал
Сравнивающее корректирующее устройство (СКУ) рассчитывает, корректирует и формирует управляющий сигнал в зависимости от функции управления, которой определена зависимость величины выходного сигнала от величины входного сигнала. Данная функция управления обеспечивает работу системы управления в пределах устойчивости.
Современные системы автоматического управления функционируют на основе трех типовых законов управления (регулирования):
- пропорциональный
- интегральный
- дифференцирующий
На базе комбинаций данных законов в современных системах реализованы более сложные алгоритмы, называемые регуляторами, которые описываются уравнениями, представленными ниже, где e(t) – отклонение заданного параметра в зависимости от времени, kп, kд, kи - постоянные коэффициенты, Ти = 1 / kи — постоянная времени интегрирования; Тд = 1 / kд — постоянная времени дифференцирования.
П - регулятор (пропорциональный (статический):
y(t) = kпe(t) (1.1.)
К достоинствам П – регулятора относятся:
а) управляющее воздействие появляется на выходе регулятора в момент появления сигнала ошибки (быстродействие)
б) простота
К недостатку П – регулятора относится:
а) ограниченная точность (особенно при управлении объектами с большой инерционностью и запаздыванием)И – регулятор (интегральный (астатический):
y(t) = kи  e(t) dt (1.2.)
e(t) dt (1.2.)
К достоинству И – регулятора относится:
а) лучшая точность, по сравнению с П – регулятором
К недостаткам И – регулятора относятся:
а) управляющее воздействие появляется с задержкой по времени
б) ухудшается устойчивость системы
ПИ – регулятор (пропорционально-интегральный (изодромный):
y(t) = kпe(t) + (kи/Ти) e(t) dt (1.3.)
К достоинству ПИ – регулятора относится:
а) компенсация недостатков предыдущих регуляторов
К недостатку ПИ – регулятора относится:
а) уменьшенная устойчивость системы
ПД – регулятор (пропорционально-дифференциальный):
y(t) = kпe(t) + kдТи de(t)/dt (1.4.)
К достоинству ПД – регулятора относится:
а) эффект упреждения при регулировании
К недостатку ПД – регулятора относится:
а) невысокая точность при регулировании
ПИД – регулятор (пропорционально-интегрально-дифференциальный):
u(t) = kпe(t) + kдТд de(t)/dt + (kи/Ти) e(t) dt (1.5.)
К достоинству ПИД – регулятора относится:
а) полная компенсация запаздывания
б) сочетание преимуществ предыдущих регуляторов
Дата добавления: 2017-01-26; просмотров: 1996;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
