Система – некоторое количество взаимосвязанных элементов, служащих для выполнения общей задачи. Во многих случаях система рассматривается как единое целое.
Основные понятия, принципы управления, история развития.
Управление – организация процесса, приводящая к достижению указанной цели.
Система – некоторое количество взаимосвязанных элементов, служащих для выполнения общей задачи. Во многих случаях система рассматривается как единое целое.
Автоматическое управление системой – управление системой без участия человека.
Ранее, в теории автоматического управления, простые системы, автоматически регулирующие отдельные параметры принято было называть регуляторами, так как роль автоматического регулирования заключалась в регулировании какого-то одного из выходных параметров систем (скорости вращения вала, давления, температуры, уровня жидкости и т.п.). В дальнейшем, при развитии науки и техники, термин – «регуляторы» стал применяться намного реже, так как, по сути, управление системой заменило регулирование. Управляемые системы стали более сложными, требующими управления несколькими выходными параметрами, поэтому в настоящее время более часто используется термин «системы автоматического регулирования» (САР) или «системы автоматического управления» (САУ), так как данные термины наиболее полно характеризуют суть процессов, происходящих в управляемой системе. В общем случае процесс реагирования системы на внешнее возмущение схематически изображен на рисунке 1.
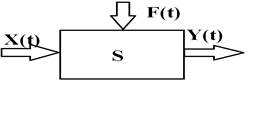
Рис. 1. Схема реагирования системы на возмущение. S – система, X(t) – входной
параметр, F(t) – внешнее возмущающее воздействие, Y(t) – выходной
параметр.
Под воздействием внешнего возмущения F(t) входной параметр X(t) при прохождении через систему изменяется и становится равным Y(t). Указанные значения выражаются через функции времени, так как имеют место в определенный момент времени и изменяются в зависимости от времени. Для того, чтобы на выходе из системы значение Y(t) было управляемым, применяются автоматические регуляторы, которые приводят систему в заданное состояние.
Одними из первых систем автоматического регулирования, знания о которых дошли до нас из истории, принято считать автоматы, описанные Героном Александрийским в его работах «Пневматика» и «Механика». Данные работы относятся к началу нашей эры и
описывают изобретения Герона и его учителя Ктесебия – пневмоавтомат, открывающий двери храма, автомат для продажи «святой воды», водяной орган. В дальнейшем для подъема воды, помола муки человек стал использовать механизмы, которые значительно облегчили указанные процессы, и которые также можно отнести к классу систем автоматического регулирования.
Например, ветряная мельница имела систему ограничения числа оборотов вала, которая не давала разгонять жернова, а также жестко связанные с жерновами лопасти мельницы до критических значений, после которых могло бы последовать разрушение данных механизмов. Это является одним из простых примеров регулирования возмущающего воздействия природных факторов (в данном случае ветра), регулирования их чрезмерного воздействия на систему.
В средние века получила развитие «андроидная» автоматика, названная так из-за сходства с человеком. Изобретатели того времени создали ряд автоматов, подражающих отдельным движениям человека, например, в XIII веке немецким алхимиком Альбертом фон Больштадтом был сконструирован прототип механического человека, открывающий и закрывающий двери.
В XVIII веке русским изобретателем Кулибиным был создан «театр автоматов», который своими размерами не превосходит куриного яйца. Данное изобретение в настоящий момент находится в Эрмитаже и доступно для обозрения. Известны и дорогие игрушки того времени, представляющие собой музыкальные шкатулки с танцующими фигурками.
Развитие промышленности в XVIII веке повлекло за собой необходимость развития автоматики, так с изобретением паровых машин возникла необходимость автоматического регулирования уровня воды в паровых котлах. В 1765 году русским механиком И.Ползуновым был создан первый промышленный регулятор уровня для котла паровой машины. На рисунке 2 изображена схема «регулятора Ползунова».
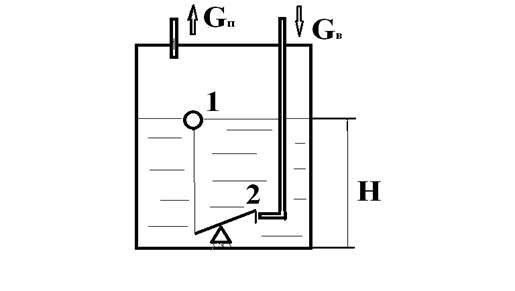
Рис. 2. Схема «регулятора Ползунова». 1 - поплавок, 2 – заслонка, H – уровень воды в
котле, Gп – подача пара из котла, Gв – подача воды в котел.
«Регулятор Ползунова» выполняет задачу по поддержанию в паровом котле постоянного уровня воды. При достижении поплавком 1 заданного уровня H через
систему рычагов заслонка 2 перекрывает трубопровод подачи воды Gв. При падении уровня поплавок 1 опускается и заслонка 2 поднимается, вновь открывая подачу воды. Подача воды будет осуществляться до момента достижения требуемого (заданного) уровня.
В 1784 году Д.Уатт сконструировал регулятор оборотов вала паровой машины, схема которого представлена на рисунке 3. Для того времени изобретение подобного регулятора было прорывом в науке, но ученые того времени считали, что регуляторы не будут существовать, как отдельный класс машин, а будут являться лишь их дополнением. С развитием науки теория автоматического управления стала отдельным разделом науки, изучающим управление в системах. Управление может относиться к различным классам систем.
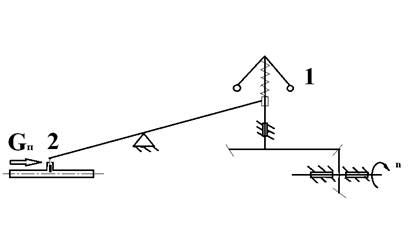
Рис. 3. Схема «регулятора Уатта». 1 - грузики, 2 – заслонка, n – количество оборотов
вала за единицу времени.
При увеличении подачи пара, начинает увеличиваться число оборотов вала, при этом грузики 1 под действием центробежной силы начинают расходиться и через рычаг канал подачи пара Gп перекрывается заслонкой 2. При уменьшении подачи пара с помощью заслонки соответственно уменьшается давление пара и число оборотов вала.
Системы, принцип действия которых показан на регуляторах Ползунова-Уатта получили название систем с обратной связью, т.к. управляющее воздействие задается с помощью учета значений выходных параметров системы.
При развитии техники дальнейшее развитие получило и научное направление по разработке различных регуляторов. Если вначале, при использовании энергии пара в паровых машинах использовались регуляторы Ползунова-Уатта, изобретатели которых являются признанными апологетами теории автоматического регулирования, то с развитием использования электричества, русским электротехником К.Константиновым в 1854 году было предложено использовать для автоматического регулирования скорости вращения вала в паровых машинах электромагнитный регулятор скорости вращения.
В 1866 году А.Шпаковским был разработан регулятор, который регулировал подачу топлива в топку в зависимости от давления пара в котле.
Общая теория регулирования была сформулирована в 1868 – 1876 годах в работах И.Вышнеградского «Об общей теории регуляторов», «О регуляторах непрямого действия», в которых прослеживаются истоки современных методов исследования устойчивости систем регулирования, и их качества регулирования (управления). Примерно в это же время были сформулированы математические критерии устойчивости систем Рауса и Гурвица.
В 1881 году А.Давыдовым была показана первая система с электрическими элементами, класс которых получил впоследствии название «следящих систем». Система Давыдова автоматически придавала артиллерийскому орудию необходимый угол возвышения при изменении задаваемого расстояния до цели.
В 1892 году А.Ляпуновым была опубликована работа «Общая задача устойчивости движения», в которой было дано строгое алгебраическое определение устойчивости, разработаны методы решения задач об устойчивости.
В 1909 году вышла в свет работа Н.Жуковского «Теория регулирования хода машин», которая явилась неоценимым вкладом в развитие теории автоматического управления.
В 1932 году Х.Найквистом была издана книга о частотных способах исследования радиотехнических усилителей, в 1938 году А.Михайловым был предложен гармонический метод в теории регулирования.
В послевоенное время теория автоматического управления получила новый толчок к развитию, появилось много новых направлений в исследованиях и множество ученых, исследовавших и описавших процессы, происходящие в технических системах при автоматическом регулировании. С развитием ядерной энергетики, космонавтики, компьютеризации, теория автоматического управления получила дальнейшее развитие в новых отраслях науки и техники, вплоть до настоящего времени появляются новые работы современных ученых. Создаются автоматизированные системы управления технологическими процессами (АСУТП), производством (АСУП), отраслью (АСУО) и т.д.
Дата добавления: 2017-01-26; просмотров: 2273;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Andante cantabile con espressione В. Моцарт. Соната для ф-п. № 8, ч. II
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
