Схематическое изображение систем
Схематическое изображение элементов или звеньев системы изображают в виде любых геометрических фигур (чаще прямоугольников), связи между данными звеньями изображаются линиями со стрелками, причем стрелка направлена в сторону направления движения сигнала. Система в общем случае условно разделяется на две части:
1. ОУ – объект управления
2. УУ – управляющее устройство
Взаимодействие указанных частей системы представлено на рисунке 4.
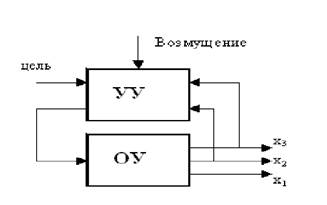
Рис. 4. Схема взаимодействия частей системы.
Х1 – прямые неконтролируемые выходные параметры ОУ
Х2 – прямые контролируемые выходные параметры ОУ
Х3 – косвенные контролируемые выходные параметры ОУ
Выходные параметры системы могут подразделяться на исследуемые и неисследуемые, в свою очередь исследуемые параметры подразделяются на:
- контролируемые параметры,
- неконтролируемые параметры, контроль за которыми может быть затруднен в процессе производства, либо такие выходные параметры имеют значения, которыми в процессе управления системой можно пренебречь.
Нами будут изучаться контролируемые выходные параметры, подразделяющиеся на прямые и косвенные, так как именно от этих параметров зависит устойчивость и качество работы системы.
Прямые выходные параметры описывают непосредственное состояние системы в определенный промежуток времени, косвенные выходные параметры после их измерения могут способствовать более точному регулированию и настройке системы.
Входящие (заданные) параметры, поступающие в управляющее устройство, изменяются с течением времени под действием внешнего возмущения. Задачей автоматического управления является достижение поставленной цели, несмотря на внешнее возмущение, несмотря на меняющиеся параметры состояния системы, возникающие из-за взаимодействия системы с окружающей средой.
Объектами управления могут являться части машин и механизмов, собственно машины и механизмы, производственные линии, технологические процессы, предприятия.
Любой технологический процесс подразумевает под собой совокупность действий, выполняемых по определенным правилам и ограниченный различными критериями.
Процессом управления называется такой процесс действий, который по заданным заранее параметрам приводит к достижению цели.
Целью управления может являться поддержание какого-либо параметра в заданном режиме, т.е. когда контролируемый параметр Xвых = const. Также целью управления может являться изменение выходного параметра системы по заданной программе. В настоящее время программируемые комплексы производят сборку автомобилей, различные технологические операции в агрессивных средах, где непосредственное участие человека небезопасно.
Различают два основных принципа управления: принцип разомкнутого управления и принцип замкнутого управления. Синтез двух указанных принципов дает в результате комбинированное управление.
Принципиальные схемы систем управления могут быть электрическими, пневматическими, гидравлическими, механическими, кинематическими и т.д.
При рассмотрении любого звена системы мы сталкиваемся с рядом физических величин, которые воздействуют на данное звено и называются входными параметрами.
В простом случае звено имеет один входной параметр Xвх. и один выходной параметр Xвых., как изображено на рисунке 5а. В более сложных случаях звено может иметь несколько входных и несколько выходных параметров, причем их число не обязательно должно быть равно друг другу. На рисунке 5б входные параметры изображены, как Xвх1, Xвх2, Xвхm. На выходе данного звена, на рисунке 5б мы имеем выходные параметры Xвых1, Xвых2, Xвыхm, которые характеризуют процессы, протекающие в этом звене.
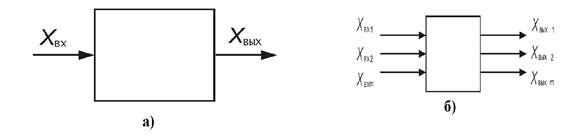
Рис. 5 Параметры звена системы.
а) звено с одним входным и одним выходным параметром
б) звено с множеством входных и выходных параметров
В обычном случае движение сигнала в звене происходит в одном направлении, т.е. входной параметр Xвх. влияет на выходной параметр Xвых., только в системах с обратной
связью выходной параметр Xвых. воздействует на входной параметр Xвх. Структурная схема системы с обратной связью представлена на рисунке 6. Под цифрой 1 на данном рисунке изображено звено, которое может являться сумматором при сложении сигналов, или сравнивающим устройством при вычитании сигналов.
В случае, показанном на рисунке 6, на объект управления (ОУ) поступает управляющий сигнал Xвх., который после прохождения через объект управления принимает значение Xвых. Через обратную связь (ОС) сигнал Xос = Xвх – Xвых поступает на сумматор или сравнивающий элемент, после чего преображается в управляющий сигнал Xвх1, которым задается требуемый параметр управления.
Например, в рассматриваемых в настоящей книге ранее регуляторах Ползунова-Уатта, обратной связью являются рычаги, жестко связанные с заслонками подачи ресурса, которые при увеличении подачи ресурса (воды, пара) регулируют устойчивую работу системы (управляют системой).
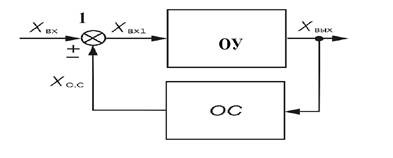
Рис. 6. Схема системы с обратной связью.
ОУ – объект управления, ОС – обратная связь, 1 – сумматор или сравнивающий
элемент, Хвх, Хвх1, Хвых, Хос – входные и выходные параметры
Сумматор или сравнивающий элемент в указанных случаях отсутствуют, т.к. имеет место наличие жесткой обратной связи, а применение вышеуказанных элементов целесообразно при наличии электрических сигналов в управлении системой.
При применении разомкнутого принципа управления на управляющее устройство (УУ) подается входной сигнал X, представляющий собой задание для выполнения поставленной задачи.
Управляющее устройство преобразует входной сигнал X в выходной сигнал U, который в свою очередь подается на объект управления (ОУ). В результате воздействия на объект управления внешнего возмущения Z на выходе объекта управления образуется сигнал Y, который и будет являться решением поставленной задачи. Этот принцип управления является простым для технической реализации, в условиях, когда известны численные характеристики внешнего возмущения, но трудноприменимым, при меняющемся характере возмущения или при стохастическом изменении параметров возмущения.
Структурная схема системы с разомкнутым принципом управления показана на рисунке 7.
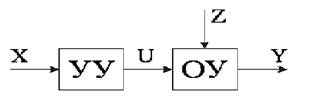
Рис. 7. Структурная схема системы с разомкнутым принципом управления
Принцип компенсации (принцип управления по возмущению) используется в случаях, когда необходимо учитывать характер возмущения при управлении объектом. Структурная схема системы с принципом управления по возмущению изображена на рисунке 8.
При применении принципа компенсации на управляющее устройство (УУ) подается входной сигнал Х, представляющий собой задание для выполнения поставленной задачи. Управляющее устройство преобразует входной сигнал Х в сигнал X1, который подается на корректор (К). Для учета величины параметров внешнего возмущения в структурную схему системы автоматического управления включено устройство, условно называемое - измеритель возмущения (И). Необходимым условием качественного функционирования рассматриваемой системы автоматического управления по принципу разомкнутого управления является наличие заранее известных физических характеристик внешнего возмущения.
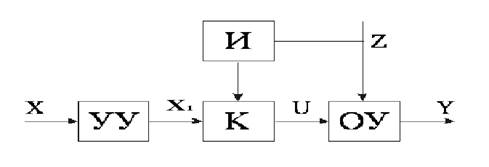
Рис. 8. Схема системы с принципом управления по возмущению.
И – измеритель возмущения, К – корректор,
УУ – управляющее устройство, ОУ – объект управления
В процессе выполнения задачи управления производится замер параметров внешнего возмущения измерителем возмущения (И), сигнал с которого в тот же момент времени поступает на корректор, в результате чего корректором вырабатывается управляющий сигнал U, учитывающий внешнее возмущение. Далее сигнал U подается на вход объекта управления (ОУ). В результате данных операций на выходе объекта управления образуется сигнал Y, который и будет являться решением поставленной задачи. Для того, чтобы принцип компенсации был более эффективен, чем принцип разомкнутого управления необходимо иметь возможность измерения параметров внешнего возмущения, определения характера возмущения.
На основании вышесказанного можно подвести итог, что наиболее удобным в практическом применении является принцип обратной связи, называемый также принципом замкнутого управления, позволяющий учитывать любой характер воздействия внешнего возмущения при решении задачи управления.
Более полная структурная схема системы с принципом замкнутого управления изображена на рисунке 9.
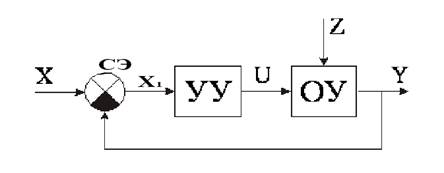
Рис. 9. Схема системы с принципом замкнутого управления.
СЭ – сравнивающий элемент, УУ – управляющее устройство, ОУ – объект
управления
При применении принципа замкнутого управления входной сигнал Х, представляющий собой задание для выполнения поставленной задачи подается на один из входов сравнивающего элемента (СЭ). На другой вход сравнивающего элемента подается по обратной связи значение выходного параметра объекта управления Y. На выходе сравнивающего элемента мы имеем сигнал Х1, представляющий собою разность между сигналами Х и Y, называемый также ошибкой или отклонением между заданным и фактически полученным значением параметров. Управляющий сигнал U вырабатывается управляющим устройством на основании величины и знака отклонения Х1, после чего подается на вход объекта управления с учетом не только задания, но и состояния объекта управления, и величины параметров внешнего возмущения. Исходя из этого, принцип замкнутого управления является наиболее универсальным, несмотря на неопределенность объекта, характера внешнего возмущения и величины параметров возмущения. Примером такого принципа управления является автопилот, который удерживает курс самолета, высоту, скорость, горизонт, в зависимости от заданных параметров (пункта назначения, эшелона), независимо от влажности воздуха, плотности облаков, температуры, скорости и направления ветра и других факторов.
Дата добавления: 2017-01-26; просмотров: 2491;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
