СТАНЦИЯ АКТИВНЫХ ШУМОВЫХ ПОМЕХ СПБ-7
3.1. ОБЩИЕ СВЕДЕНИЯ
Наземная подвижная станция СПБ-7 предназначена для создания прицельных активных шумовых помех самолетным РЛС навигационно-бомбардировочных и навигационно-прицельных систем, работающим в ее диапазоне. На индикаторе РЛС, размещенной на самолете, штурман или летчик, наблюдая радиолокационную панораму местности, определяет местоположение своего самолета и выбирает объект для прицельного бомбометания или пуска ракет.
Создаваемая с помощью станции помеха маскирует изображение местности и объекта на экране РЛС, не давая возможности экипажу самолета выполнить отмеченные операции. В состав станции входят: система поиска; система пеленга;
система управления антеннами по азимуту;
система определения угла места;
система управления антеннами по углу места;
система настройки и наведения;
система управления передатчиками по частоте;
передающая система;
система электропитания.
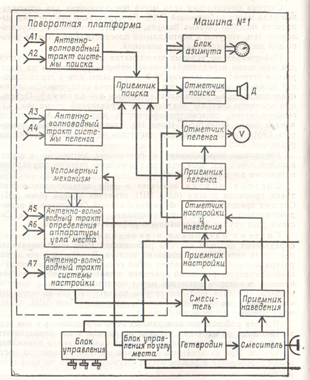
Все перечисленные системы размещаются в двух прицепах (в машинах № 1 и 2). В машине № 1 размещена (в соответствии с приведенной последовательностью) первая, вторая, четвертая и шестая системы, часть аппаратуры управления приемными, передающими антеннами и частотой передатчика помех.
В машине № 2 размещены передающая система, элементы систем управления антеннами и частотой передатчика помех. Структурная схема станции приведена на рис. 3.1.
Система пеленга предназначена для определения направления прихода сигналов в горизонтальной плоскости от работающей панорамной РЛС. Система реализует амплитудно-разностный метод определения направления. Она построена на основе использования двух приемных каналов. Приемные каналы включают в себя: антенно-волноводный тракт, два предварительных усилителя пеленга, размещенные в приемнике поиска, усилитель пеленга (блок ЗШ) и отметчик пеленга (блок 8Ш). Управление антеннами в процессе пеленгования работающей РЛС осуществляется оператором станции вручную путем поворота рамы, на которой размещены все приемные антенны. Пеленгование цели контролируется по индикатору азимута (блок 8Ш).
Система определения угла места предназначена для определения угла места работающей РЛС. Конструктивно эта система выполнена подобно системе пеленга, но имеет особенности, обусловленные тем, что угол в вертикальной плоскости определяется только для десяти фиксированных значений.
Информация об угловых координатах в станции используется для наведения передающих антенн, которые размещены на поворотном устройстве в машине № 2. Управление ими в горизонтальной плоскости осуществляется автоматически синхронно-следящим приводом системы управления антеннами по азимуту. Отдельные элементы системы показаны на структурной схеме рис. 3.1: сельсин-датчик, сельсин-трансформатор, каскады азимутального канала блока усилителей (блок 18), электромеханический усилитель (ЭМУ) и исполнительный двигатель механизма вращения передающих антенн.
Управление передающими и приемными антеннами в вертикальной плоскости производится с помощью системы управления антеннами по углу места.
Система поиска включает в себя антенно-волноводный тракт, приемник поиска (блок 1Ш), отметчик поиска (блок 2Ш). Система представляет собой многоканальный беспоисковый разведывательный приемник с волноводпыми фильтрами на входе. Система дает грубую информацию о рабочей частоте РЛС.
Система настройки и наведения служит для точного определения несущей частоты работающей РЛС и для контроля наведения передатчиков помех по частоте. Входящая в нее аппаратура настройки представляет собой семидиапазонный перестраиваемый супергетеродинный приемник с двойным преобразованием частоты, в котором применен метод последовательного уточнения частоты. В состав этой аппаратуры входят: антенно-волноводный тракт, приемник настройки (блок 4), гетеродин (блок 5Ш), отметчик настройки и наведения (блок 6).
Частота работающих панорамных РЛС определяется в два этапа. Точность определения частоты на первом этапе определяется половиной широкой полосы пропускания одного канала приемника настройки. Для дальнейшего уточнения частоты аппаратура настройки переводится в режим электрического качания частоты гетеродина.
Качание частоты в этом режиме осуществляется в пределах полосы пропускания одного выбранного канала приемника настройки. Одновременно полоса пропускания этого же канала после перехода в режим электрического качания сужается в шесть раз, что позволяет во столько же раз повысить точность определения частоты. Значение частоты сигнала определяется по шкале волномера, встроенного в блок гетеродина.

В блоке гетеродина имеется запоминающее устройство, которое позволяет производить запоминание и воспроизведение трех частот настройки приемника в любом из семи поддиапазонов.
В эту же систему входит приемник наведения (блок 7), предназначенный для приема сигналов передатчика помех. Спектр передатчика помех воспроизводится на отметчике настройки и наведения. Система настройки и наведения позволяет совмещать частоты настройки обоих приемников на общем индикаторе. Совмещение спектра передатчика помех с сигналом на индикаторе (блоке 6) свидетельствует о правильности наведения передатчика помех по частоте.
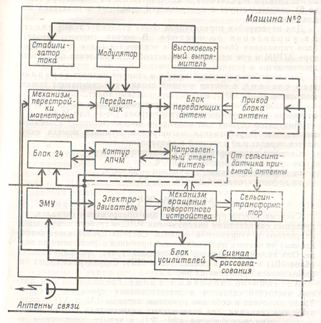
Для перестройки передатчиков помех станции служит система управления по частоте. В состав системы входят: блок управления (блок 12Л), блок усилителей (блок 18), три контура АПЧМ и три механизма перестройки. Управление по частоте производится в режиме автоматической и ручной перестройки.
Для выработки шумовой помехи в станции имеется передающая система, в состав которой входят: три генератора помех; модулятор (блок 19М); антенно-волноводный тракт.
Диапазон работы каждого из трех генераторов помех зависит от литера используемого в нем магнетрона (М-44 или М-45).
Модулятор служит для модуляции высокочастотных колебаний магнетрона. Выработанная магнетроном шумовая помеха излучается передающей антенной в направлении цели.
Скорость транспортирования станции:
по проселочной дороге— 15 км/ч;
по дороге с булыжным покрытием — 25 км/ч;
по асфальтированной дороге — до 50 км/ч.
3.2. СИСТЕМА ПОИСКА
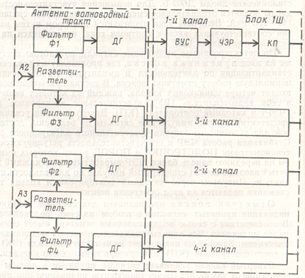
Система поиска предназначена для обнаружения сигналов, излучаемых самолетными панорамными РЛС, и грубого определения их частоты и направления прихода. Система представляет беспоисковый по частоте многоканальный приемник с фильтрами на входе. Она включает: антенно-волноводный тракт, приемник поиска (блок 1Ш) и отметчик поиска (блок 2Ш). Структурная схема системы поиска приведена на рис. 3.2.
Антенно-волноводный тракт предназначен для приема, частотной селекции и детектирования принятых сигналов. Тракт включает в себя две рупорные антенны (А2 и A3) с фазирующими секциями, два волноводных разветвителя, четыре волно- водных полосовых фильтра (Ф1—Ф4) и четыре детекторные головки. Все эти элементы с приемником поиска размещены на поворотной платформе машины № 1.
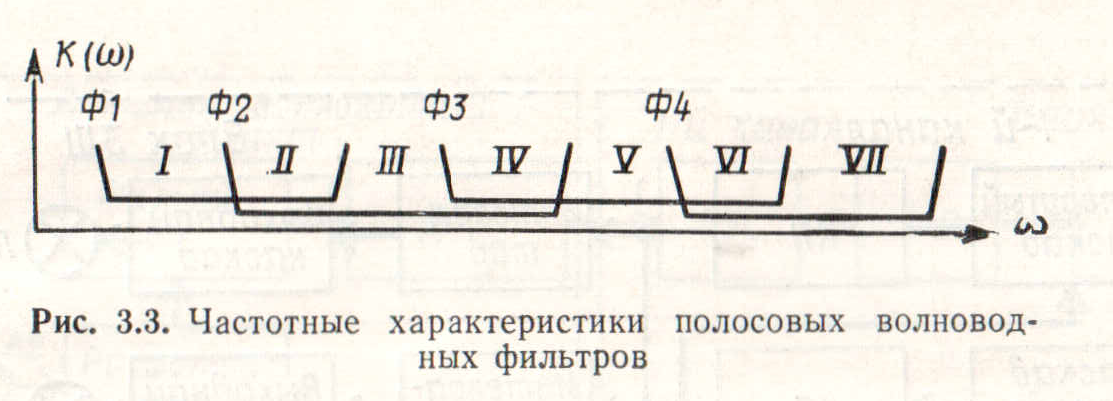
Рупорная антенна и фазирующая секция обеспечивают направленный прием сигналов, поляризация которых изменяется в широких пределах.Разветвитель волноводного типа распределяет всю мощность Принятого сигнала к тому фильтру, полоса пропускания которого совпадает с частотой сигнала. Четыре фильтра делят рабочий диапазон станции на семь частотных поддиапазонов, как показано на рис. 3.3. При этом три четных поддиапазона образуются в области частот, которые одновременно перекрываются полосой пропускания соседних фильтров (Ф1, Ф2; Ф2, ФЗ; ФЗ, Ф4), а четыре нечетных поддиапазона — в области частот, которые входят в полосу пропускания только одного фильтра.
Сигналы с выходов фильтров поступают к детекторным головкам волноводного типа. В качестве детекторов используются кристаллические диоды Д602-Б. Для повышения чувствительности на диоды подается отрицательное смещение, создающее ток смещения 140—150 М'кА. Величина тока проверяется прибором путем нажатия соответствующих кнопок контроля тока, находящихся на передней панели блока 1Ш.
Продетектированные импульсные сигналы по кабелю поступают на вход приемника поиска, где происходит их усиление и стандартизация по длительности и амплитуде, что обеспечивает нормальную работу отметчика поиска. В состав приемника поиска входят четыре одинаковых канала, каждый из которых включает в себя видеоусилитель (ВУ), чувствительное электронное реле (ЧЭР) и катодный повторитель (КП). Видеоусилители усиливают продетектированные импульсные сигналы до величины, достаточной для устойчивого запуска чувствительного электронного реле. Стабильная работа ЧЭР и его чувствительность регулируются потенциометрами ПОДСТРОЙКА и ПОРОГ, ручки которых выведены на переднюю панель блока. ЧЭР вырабатывает на каждый принятый входной сигнал стандартный импульс по длительности и амплитуде. Импульсы через катодный повторитель и кольца токосъемника подаются на вход отметчика поиска.
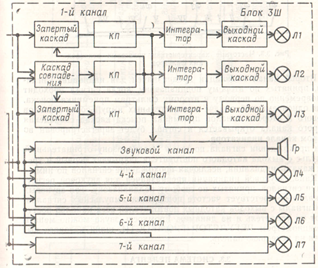
Отметчик поиска предназначен для световой и звуковой индикации принятых сигналов в любом из семи поддиапазонов. В соответствии с семью поддиапазонами отметчик имеет семь каналов индикации. Все каналы индикации нечетных поддиапазонов идентичны. Каждый из них состоит из запертого каскада (ЗК), катодного повторителя (КП), интегратора и выходного каскада.
Запертый каскад усиливает сигналы, принятые в данном поддиапазоне, а также исключает ошибочную индикацию при приеме сигнала по другому поддиапазону. Катодный повторитель служит для развязки между собой запертого каскада, интегратора и звукового канала. Отрицательные импульсы с катодного повторителя подаются на вход интегратора, который служит для повышения помехоустойчивости каналов. С увеличением числа импульсов, воздействующих на вход интегратора, растет величина его выходного напряжения, которая подается на сетку лампы выходного каскада. Нагрузкой каскада является обмотка реле. В исходном состоянии выходной каскад заперт. По мере увеличения положительного смещения его ток растет и достигает значения, при котором срабатывает реле, контакты замыкают цепь сигнальной лампочки соответствующего номера частотного поддиапазона.

Изменяя величину сопротивления ПРЕДЕЛЫ ИНТЕГРИРОВАНИЯ, шлиц которого выведен на панель, можно добиться загорания лампочки от заданного числа импульсов в серии. Этим исключается регистрация случайных импульсов. Если сигналы идут сериями, лампочка мигает с частотой их поступления. В случае приема импульсов с непрерывной последовательностью лампочки будут гореть непрерывно. Каналы индикации четных поддиапазонов также идентичны.
 Второй канал индикации предназначен для индикации сигналов, принятых по второму поддиапазону, когда сигнал проходит одновременно по первому и второму фильтрам приемника поиска. При одновременной подаче положительных импульсов с выходов первого и второго каналов приемника поиска каскад совпадения второго канала открывается и сигнал будет зарегистрирован во втором канале индикатора.
Второй канал индикации предназначен для индикации сигналов, принятых по второму поддиапазону, когда сигнал проходит одновременно по первому и второму фильтрам приемника поиска. При одновременной подаче положительных импульсов с выходов первого и второго каналов приемника поиска каскад совпадения второго канала открывается и сигнал будет зарегистрирован во втором канале индикатора.
При прохождении сигнала по этому поддиапазону отрицательный импульс с выхода катодного повторителя закрывает первый и третий каналы индикации, исключая прохождение сигналов по ним.
Канал звуковой индикации предназначен для звуковой регистрации сигналов, принятых по любому поддиапазону. Тон звуковых сигналов соответствует частоте повторения импульсных сигналов.
Сигналы с выходов катодных повторителей всех каналов поступают на усилитель и на динамик. Громкость звука можно менять потенциометром РЕГУЛЯТОР ГРОМКОСТИ, шлиц которого выведен на переднюю панель.
3.3. СИСТЕМА ПЕЛЕНГА
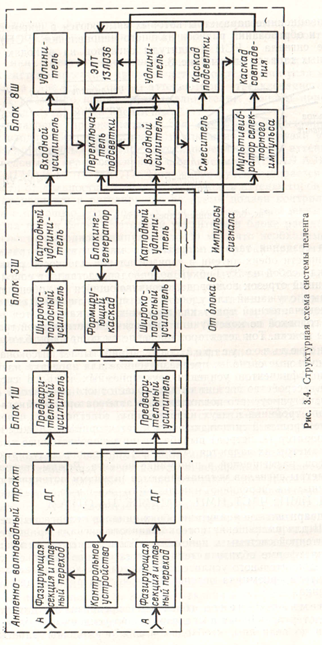
Система пеленга предназначена для определения направления прихода сигнала в азимутальной плоскости работающей панорамной РЛС. Система реализует двухканальный амплитудно-разностный метод определения направления и включает: антенно-волноводный тракт с контрольным устройством, два предварительных усилителя пеленга, размещенных в приемнике поиска (блок 1Ш), и отметчик пеленга (блок 8Ш). Структурная схема системы приведена на рис. 3.4.
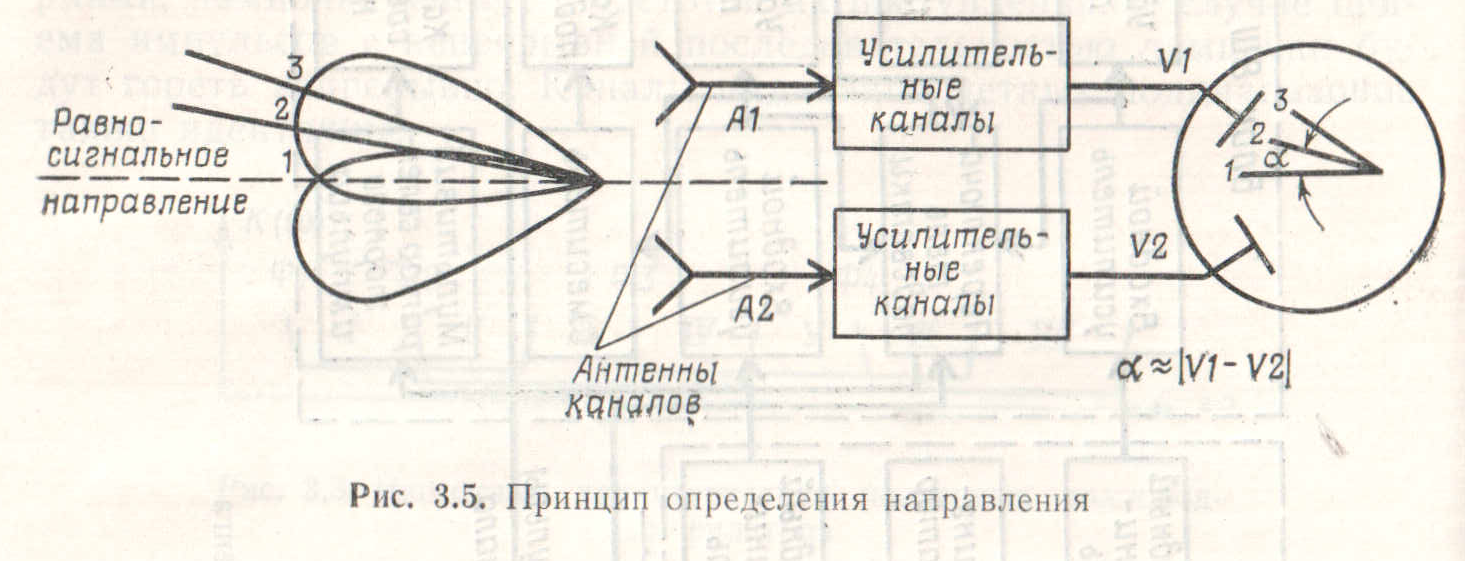
В антенно-волноводный тракт входят: две рупорно- линзовые антенны с фазирующими секциями, два гибких волновода и две детекторные головки. Рупорно-линзовые антенны с фазирующими секциями служат для направленного приема сигналов, поляризационные параметры которых изменяются в широких пределах, и образования равносигнального направления (РСН). При приеме сигнала с РСН амплитуды сигналов на выходах обоих приемных каналов равны (рис. 3.5).
Для создания такого направления максимумы диаграмм направленности обеих антенн в горизонтальной плоскости развернуты между собой на 3°. Гибкий волновод представляет собой гофрированный отрезок волновода, оканчивающийся с обеих сторон фланцами, служащий для удобства юстировки антенной системы.
Высокочастотный тракт каждого канала заканчивается детекторной головкой по конструкции аналогичной детекторной головке системы поиска. Ток детекторов проверяется по прибору блока 1Ш.
Контрольное устройство вырабатывает высокочастотные импульсные сигналы, предназначенные для проверки идентичности коэффициентов усиления двух приемных каналов системы пеленга. Устройство состоит из высокочастотного генератора (клистрона), регулируемого поглощающего аттенюатора, двойного волноводного тройника и двух направленных ответвителей, через которые контрольный сигнал подается к детекторным головкам каналов. Генератор (клистрон) вырабатывает высокочастотные импульсы. Параметры их задаются схемой формирования модулирующих импульсов, размещенной в приемнике пеленга. Режим генератора и параметры сигналов устанавливаются шлицами потенциометров, выведенных на переднюю панель этого же блока, с надписями: ОТРИЦ. ИМП.; ЧАСТ. ИМП.; НАПРЯЖ. НА ОТРАЖ.
Предварительные усилители обоих каналов пеленга вынесены в блок 1Ш для уменьшения потерь мощности сигнала при передаче ее от антенной системы к приемнику. Блок размещен на вращающейся платформе вблизи антенн. Отрицательные импульсы с выхода предварительного усилителя подаются на вход двухканального усилителя приемника пеленга через кольца вращающегося токосъемника.
Приемник пеленга (блок ЗШ) предназначен для усиления продетектированных и предварительно усиленных в блоке 1Ш сигналов до величины, необходимой для нормальной работы отметчика пеленга. Кроме того, в этом блоке размещена схема, вырабатывающая модулирующие импульсы для клистрона контрольного устройства.
Приемник имеет четыре канала усиления, два из которых относятся к системе пеленга и два — к системе определения угла места. Каждый из каналов состоит из аттенюатора, трехкаскадного усилителя и катодного повторителя (удлинителя). Каналы приемников пеленга и угла места идентичны.
Аттенюаторы предназначены для ступенчатой регулировки уровня входного сигнала в целях исключения перегрузки усилительных и оконечных каскадов. Ручки переключателей аттенюаторов выведены на переднюю панель с надписями СИГНАЛ АЗИМУТА и СИГНАЛ УГЛА МЕСТА. Положение ручек выбирается в зависимости от дальности до цели. Идентичность аттенюаторов в каналах проверяется и регулируется во время подачи контрольного сигнала с помощью подстроечных конденсаторов, выведенных под шлицы на шасси блока. Катодный усилитель в блоке растягивает длительность выходного импульса до 30 мкс, что необходимо для увеличения яркости свечения индикаторной трубки при регистрации сигналов.
Отметчик пеленга (блок 8Ш) предназначен для контроля пеленгования сигнала по азимуту и углу места. Отметчик состоит из индикатора пеленга, индикатора угла места и общей схемы подсветки сигналов. Сигналы на пластины трубки подаются через входные усилители и удлинители. Остальные элементы различных каналов одинаковы. Рассмотрим один из каналов.
Входные усилители усиливают положительные импульсы, которые затем подаются на катодный удлинитель. Усилители имеют регулировки БАЛАНС. УСИЛ., выведенные под шлицы на переднюю панель блока. Сигналы с выхода удлинителя подаются на две ортогональные пластины трубки. На аналогичные две другие пластины подается положительное напряжение с движка потенциометра ЦЕНТРИРОВАНИЕ азимутального индикатора, шлиц которого имеется на передней панели.
Под действием усиленных и удлиненных импульсных сигналов луч трубки перемещается от центра к периферии и возвращается обратно. Так как пластины трубки повернуты под углом 45° к горизонтальной линии, то при приеме сигналов с равносигнального направления луч отклоняется вертикально вверх, как показано на рис. 3.5. Если направление прихода сигналов не соответствует равносигнальному, то луч отклоняется на угол а, пропорциональный разности амплитуд сигналов, подаваемых на пластины трубки. Направление отклонения луча влево или вправо характеризует направление отклонения цели от РСН.
Для получения нормальной отметки в момент приема серии сигналов на трубку подаются подсвечивающие импульсы при приеме сигнала любым из каналов приемника пеленга. Это достигается путем смешивания и подачи их через выходной каскад подсветки на управляющую сетку трубки.
В целях облегчения работы оператора при наличии нескольких целей в блоке предусмотрена возможность подсветки на экране отметчика лишь тех сигналов, которые выбраны на частотной развертке отметчика настройки для подавления. Это осуществляется мультивибратором селекторного импульса, который запускается первым импульсом электрического визира блока 6 и своим импульсом открывает каскад совпадения. Поэтому на экране отметчика пеленга подсвечиваются только те сигналы, которые располагаются на участке развертки между симметричными импульсами электрического визира отметчика настройки. Переключение вида подсветки производится переключателем ВНЕШНЯЯ ПОДСВ., находящимся на панели блока.
3.4. СИСТЕМА УПРАВЛЕНИЯ ПО АЗИМУТУ
Система управления антеннами по азимуту предназначена:
для управления вращением приемных антенн по азимуту;
для отсчета азимута цели;
для обеспечения синхронного автоматического слежения передающих антенн за положением приемных антенн.
Система управления по азимуту позволяет работать в трех режимах: кругового автоматического поиска, секторного автоматического поиска и ручного управления.
Блоки и узлы системы размещены в машинах № 1 и 2.
В машине № 1 находятся: механизм моторного привода, механизм установки скорости, механизм ручного привода, механизм вращения, рама с аппаратурой, блок азимута (блок 9Ш), щиток реверсирования.
В машине № 2 находятся: азимутальный канал блока усилителей (блок 18), электромашинный усилитель ЭМУ-ЗА, механизм вращения, поворотное устройство.
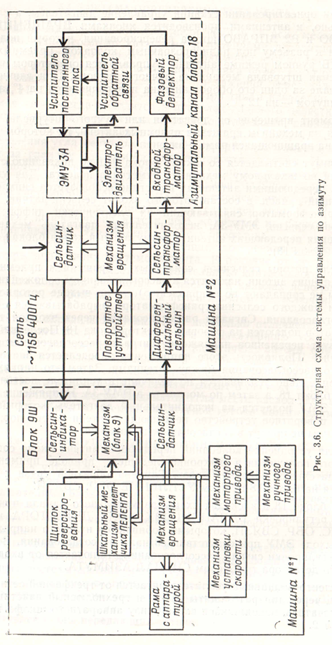
Структурная схема системы приведена на рис. 3.6.
В зависимости от режима управления приемные антенны приводятся во вращение электродвигателем МЕХАНИЗМ МОТОРНОГО ПРИВОДА или штурвалом МЕХАНИЗМ РУЧНОГО ПРИВОДА. Необходимый режим работы устанавливается переключателем РЕЖИМ РАБОТЫ на блоке азимута.
В автоматическом режиме антенны вращаются двигателем механизма моторного привода через шариковый регулятор скорости. Скорость вращения антенны устанавливается шлицем механизма установки скорости, который имеет шкалу, указывающую время в секундах поворота антенн на угол 10°.
Двигатель механизма моторного привода — переменного тока, трехфазный. Питается напряжением, снимаемым с блока азимута. В режиме секторного автоматического поиска реверсирование двигателя производится изменением фаз питающих напряжений. Величина сектора отклонения антенны устанавливается переключателями УСТАНОВКА СЕКТОРА ОТ и УСТАНОВКА СЕКТОРА ДО на передней панели блока 9Ш.
При ориентировании станции управление двигателем, а следовательно, и антеннами производится кнопками ВРАЩЕНИЕ В1 ВЛЕВО и В2 ВПРАВО щитка реверсирования, который подключается к разъему под радиопрозрачным колпаком приемных антенн. В ручном режиме антенна управляется оператором путем вращения штурвала механизма ручного привода. При вдвинутом штурвале за один его оборот антенна поворачивается на 4°, а при выдвинутом — на 12°.
Момент вращения от двигателя или ручного штурвала передается на механизм вращения приемных антенн, на котором установлена вращающаяся рама с антеннами.
Азимут считывается со шкалы блока 9Ш по показанию стрелки или по шкальному механизму отметчика пеленга. Для управления передающими антеннами в системе используется синхронно- следящий привод, в состав которого входят сельсин-датчик, .сельсин-трансформатор, связывающий их электрически дифференциальный сельсин, ЭМУ-ЗА, исполнительный двигатель механизма вращения передающих антенн и азимутальный канал блока усилителей (блок 18).
Если роторы сельсинов, связанных с вращением приемных и передающих антенн, находятся в рассогласованном положении (антенны не совпадают по направлению), то на выходе роторной обмотки каждого сельсина-трансформатора вырабатывается сигнал рассогласования. Сигналы рассогласования через входной трансформатор подаются на фазовый детектор блока 18. Последний преобразует переменное напряжение сигнала рассогласования в постоянное. Полярность этого напряжения определяется знаком углового рассогласования между антеннами. Затем это напряжение первоначально усиливается по величине в усилителе постоянного тока блока 18, а затем по мощности в ЭМУ-ЗА. Напряжение с выхода ЭМУ подается на исполнительный двигатель, который вращает поворотное устройство передающих антенн до тех пор, пока сельсины не придут в согласованное положение.
Для устранения колебаний передающих антенн около согласованного положения в синхронно-следящем приводе применяется отрицательная обратная связь. Глубина обратной связи регулируется на блоке 18 шлицем УСИЛЕНИЕ ОБР. СВЯЗИ.
В блоке 18 в каскадах схемы азимутального канала применяются регулировки БАЛАНСИРОВКА ФАЗ. ДЕТЕКТОРА и БАЛАНС. ОБР. СВЯЗИ, которыми добиваются нулевого напряжения на выходе ЭМУ при отсутствии сигнала рассогласования. Во время регулировки сигнал рассогласования отключается от входа фазового детектора тумблером СИГНАЛ АЗИМУТА.
Электромашинный усилитель питается от трехфазной сети 220 В 50 Гц через аппарат защиты АП-50 и трехполюсный пакетный переключатель, находящийся слева внизу аппаратного шкафа машины № 2.
3.5. СИСТЕМА ОПРЕДЕЛЕНИЯ УГЛА МЕСТА
Сопровождение подавляемой дели (РЛС) по углу места и управление угломестными антеннами и антеннами передатчика помех в отличие от сопровождения и управления ими по азимуту не плавное, а дискретное. Антенны передатчика помех по углу места могут занимать 10 фиксированных положений через каждые 4а (6, 10, 14, 18, 22, 26, 30, 34, 38 и 42°). При таком наведении подавляемая цель всегда находится в пределах главного лепестка диаграммы антенны передатчика вплоть до угла места, равного примерно 45°. Это условие выполняется благодаря тому, что система определения угла места обеспечивает определение момента выхода цели за границу диаграммы направленности антенны. Именно в этот момент происходит изменение их углового положения на 4° вверх для приближающейся цели. Равносигнальное направление антенн системы определения угла места смещено вверх на 2° по отношению к максимуму диаграммы передающей антенны. Поэтому в момент переключения антенн цель находится на равносигнальном направлении. Это облегчает работу оператора.
Рассматриваемая система по принципу построения и составу аппаратуры аналогична системе пеленга. В отличие от системы пеленга эта система не имеет самостоятельного контрольного устройства. Для контроля равенства усиления в каналах используется контрольное устройство системы пеленга путем переключения кабелей.
Система определения угла места несколько отличается от системы пеленга построением антенн и индикаторного устройства. Антенное устройство состоит из двух идентичных антенн, образующих равносигнальное направление в вертикальной плоскости. Угломестный механизм обеспечивает изменение наклона обеих антенн. Сам же угломестный механизм входит в систему управления антеннами по углу места. Индикатор угла места расположен в блоке 8Ш. Он собран на электронно-лучевой трубке малого диаметра.
3.6. СИСТЕМА УПРАВЛЕНИЯ АНТЕННАМИ ПО УГЛУ МЕСТА
Система управления по углу места предназначена для дистанционного управления угломестными антеннами приемной машины и отражателями блока передающих антенн. Система обеспечивает ступенчатое изменение угла наклона. Управление антеннами осуществляется двумя потенцнометрическими релейными следящими системами.
Рассмотрим работу потенциометрической релейной следящей системы управления отражателями блока передающих антенн. Эта следящая система состоит (рис. 3.7) из следующих элементов: потенциометров-датчиков, поляризованных и исполнительных реле, расположенных в блоке управления угломестной системы (УМС), потенциометра-приемника, исполнительного электродвигателя и отражателей блока передающих антенн.
Потенциометры-датчики и приемник включены по схеме моста, в одну из диагоналей которого включено поляризованное реле. Потенциометры питаются от постоянного источника. Положение отражателя передающей антенны задается переключателем УГОЛ МЕСТА, рукоятка которого выведена на переднюю панель блока управления. Каждому положению переключателя соответствует свое выходное напряжение, которое подается на один из концов обмотки поляризованного реле. На другой конец обмотки напряжение поступает с потенциометра-приемника, ось которого связана с положением отражателей передающих антенн.
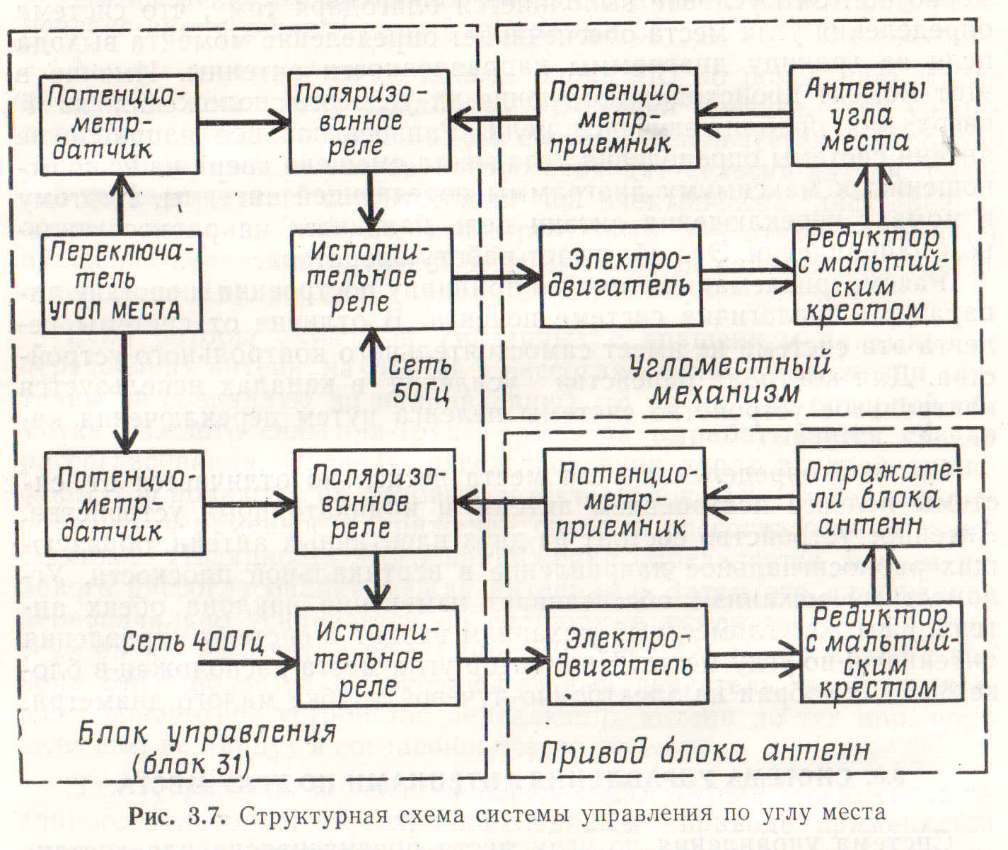
Если при заданном положении переключателя УГОЛ МЕСТА напряжение, снимаемое с потенциометра-приемника, отличается от напряжения, снимаемого с потенциометра-датчпка, то через обмотку поляризованного реле потечет уравнительный ток. Это вызовет срабатывание реле. Через его замкнутые контакты подается питание на обмотку исполнительного реле. Исполнительное реле срабатывает и включает исполнительные двигатель привода блока антенн, вращающий отражатель и потенциометр-приемник. Как только отражатель займет нужное угловое положение, уравнительный ток станет равным нулю, исполнительное реле отключит питание двигателя. Чтобы отражатель антенны занял строго фиксированное угловое положение, момент вращения двигателя на отражатели передается через редуктор с мальтийским крестом.
Следящая система управления положением приемных антенн аналогична рассмотренной. Разница состоит лишь в том, что ее антенны входят в состав угломестного механизма.
В целях исключения выхода из строя двигателей, когда антенна ставится на механический упор, их обмотки питаются через концевые микровыключатели. Для контроля отработки заданного углового положения антенн на передней панели блока 31 находятся две сигнальные лампочки ИНДИКАЦИЯ ОТСЛЕЖИВАНИЯ. Если антенны занимают заданный угол места — лампочки не горят, а в процессе отработки они загораются. Сбоку на шасси выведены шлицы потенциометров, которые стоят в цепи питания потенциометров-датчиков релейной потенциометрической следящей системы передающей антенны и релейной следящей системы приемника. Они служат для настройки системы.
3.7. СИСТЕМА НАСТРОЙКИ И НАВЕДЕНИЯ
Система настройки и наведения предназначена для точного определения несущей частоты бортовой РЛС и контроля наведения передатчиков помех по частоте. В состав системы входят аппаратура настройки и приемник наведения.
Аппаратура настройки включает в себя: антенно-волноводный тракт, приемник настройки (блок 4), гетеродин (блок 5Ш), блок реле (блок 30) и отметчик настройки и наведения (блок 6). Эта аппаратура представляет собой перестраиваемый супергетеродинный панорамный приемник с двойным преобразованием частоты, в котором применен двухступенчатый метод последовательного уточнения частоты. Структурная схема системы настройки и наведения приведена на рис. 3.8.
Антенно-волноводный тракт состоит из рупорной антенны, фазирующей секции, вращающегося сочленения и смесителя. Назначение первых двух элементов тракта подобны назначению аналогичных элементов системы поиска.
Вращающееся сочленение служит для передачи высокочастотной энергии сигнала от антенны к смесителю. Смеситель преобразует частоту сигнала в сигнал промежуточной частоты. На один из его входов подается напряжение гетеродина, а на другой — сигнал с антенны. Ток смесителя контролируется по прибору на блоке 4. Выход смесителя подключен ко входу приемника (блок 4), который усиливает преобразованный сигнал, детектирует и вновь усиливает по видеочастоте до величины, необходимой для нормальной работы отметчика.
Приемник состоит из широкополосного усилителя сигналов первой промежуточной частоты (УПЧ-1), второго смесителя, второго гетеродина и трех каналов приемника. Каждый из каналов включает в себя усилитель сигналов второй промежуточной частоты (УПЧ-2), детектор, видеоусилитель и катодный повторитель.


Второй смеситель с гетеродином понижает частоту сигнала в целях получения лучшей избирательности. Частотные характеристики трех каналов УПЧ-2 последовательно перекрывают всю полосу пропускания приемника. Частоты каналов приемника взаимно расстроены в среднем на 13 МГц. Такая особенность построения повышает вероятность обнаружения кратковременных сигналов. Полоса пропускания каналов УПЧ-2 может переключаться с широкой (режим механической перестройки частоты гетеродина) на узкую (режим электронной перестройки частоты гетеродина), что соответствует двум ступеням определения частоты сигнала.
Каждый из каналов УПЧі,2, з-2 имеет раздельную регулировку усиления в режимах широкой и узкой полосы. Регулировки выведены на переднюю панель блока. Общая ступенчатая ручная регулировка усиления приемника вынесена в блок управления (блок 12Л) с надписью РЕГУЛИРОВКА УСИЛЕНИЯ.
Гетеродин (блок 5Ш) служит для: выработки гетеродинного напряжения; перестройки приемника в семи поддиапазонах; выработки напряжения развертки отметчика настройки и наведения в режиме механической перестройки; измерения несущей частоты сигнала с точностью ±0,2%; запоминания и воспроизведения трех частот настройки в любом из семи поддиапазонов. Состав гетеродина показан на структурной схеме рис. 3.8.
В качестве генератора в блоке используется клистрон К-12 с объемным перестраиваемым резонатором. Диапазон приемника переключается изменением положения поршня в этом резонаторе, а плавная перестройка — путем механического вращения щелевого валика. Поршень и щелевой валик соединены с механизмом настройки, в который входят два исполнительных двигателя с редукторами.
Исполнительный двигатель, перемещающий поршень, входит в состав грубой релейной потенциометрической следящей системы. С ее помощью производится включение нужного поддиапазона (нажимается кнопка включения поддиапазона на пульте управления), включение запоминания (нажимается одна из трех кнопок запоминания частоты магнетрона) и воспроизведения запомненного поддиапазона (вновь нажимается кнопка запоминания частоты магнетрона). Эти коммутации выполняются тремя группами реле запоминания поддиапазонов, расположенных в блоке 30. Положение поршня в резонаторе фиксируется мальтийским крестом.
Ручное управление вращением щелевого валика (плавная настройка приемника) производится с помощью трех точных следящих систем, в состав каждой из которых входят ВТ-датчик настройки (рукоятка его выведена на пульт управления) и группа реле запоминания точной настройки. Общими элементами этих трех следящих систем являются: усилитель сигнала рассогласования, ВТ- приемник, исполнительный двигатель и другие вспомогательные элементы. Запоминание частоты производится путем электрического отключения группой соответствующих реле, ВТ-датчика от схемы точной следящей системы и механической фиксации углового положения ротора этого датчика после настройки приемника на частоту сигнала. При воспроизведении частоты ротор освобождается и ВТ-датчик вновь подключается к следящей системе, поворачивающей щелевой валик на угол, соответствующий ранней настройке приемника.
При включении любого из семи частотных поддиапазонов (путем нажатия кнопки ПОДДИАПАЗОНЫ) на исполнительный двигатель точной следящей системы подается постоянное по амплитуде напряжение 400 Гц, которое заставляет вращаться двигатель, осуществляя непрерывный поиск в поддиапазоне с частотой 50 Гц. В том случае, когда сигналы РЛС имеют длинную серию импульсов, на выходах трех каналов приемника они появляются последовательно во времени. Очередность их появления позволяет отличить основной сигнал от зеркального. При перестройке приемника, когда луч движется по экрану слева направо, отметки сигналов появляются на нем вначале в 1-м канале (вверх), затем во 2-м (яркая точка) и 3-м (вниз).
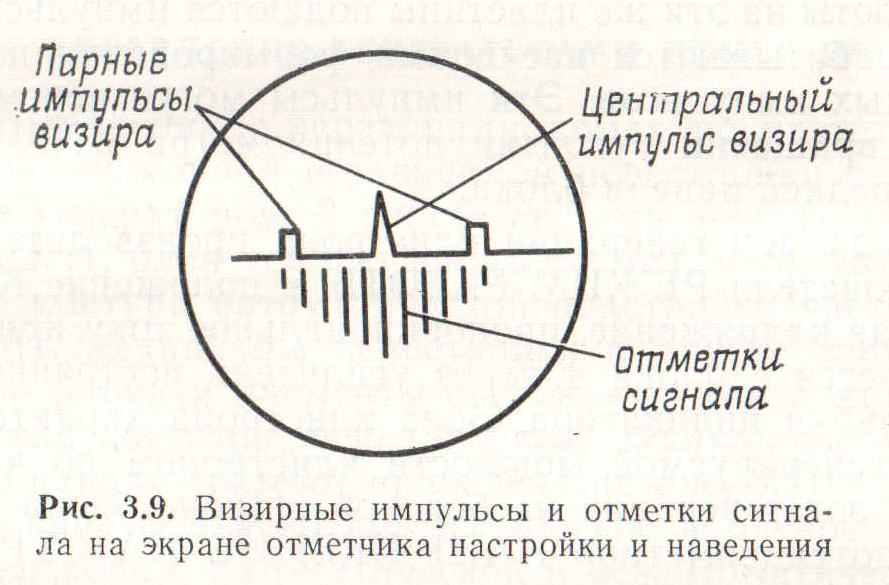
Для измерения частоты настройки приемника в блок гетеродина встроен волномер, его микрометрический винт со шкалой находится на панели этого же блока. Волномер соединен с объемной камерой клистрона. Частота измеряется, когда сигнал проходит по 2-му каналу приемника при точной (ручной) настройке приемника в режиме узкой полосы. Отметки сигнала на индикаторе при этом должны находиться под визирными импульсами, как показано на рис. 3.9.
Настройка волномера контролируется по максимальному отклонению стрелки индикатора волномера, расположенного рядом, с ним.
В состав гетеродина, кроме того, входят: генератор 100 кГц, гониометр, детектор и парафазный усилитель. Эти элементы служат для выработки напряжения частотной развертки, формирование которого в режиме механической перестройки происходит следующим образом. Гармоническое колебание, вырабатываемое генератором 100 кГц, модулируется емкостным гониометром по симметричному пилообразному закону синхронно с перестройкой приемника. Это напряжение затем детектируется и через парафазный усилитель подается на горизонтальные пластины трубки отметчика настройки и наведения.
Отметчик настройки и наведения (блок 6) предназначен для индикации настройки приемника на частоту сигнала и контроля наведения спектра передатчика помех. Отметчик имеет три режима работы.
В режиме механического качания частоты на горизонтально отклоняющие пластины трубки подается напряжение частотной развертки, вырабатываемое в блоке 5Ш. Принятые же сигналы с 1-го и 3-го каналов блока 4 через усилительные каналы и переключатель режимов работы в положении МЕХ. блока 6 поступают на горизонтально отклоняющие пластины, создавая отметку вверх (от 1-го канала) и вниз (от 3-го канала). Сигналы 2-го канала суммируются с сигналами остальных каналов и подаются через каскад подсветки на управляющий электрод трубки. Поэтому отметка сигнала от 2-го канала наблюдается только в виде яркой точки.
В режиме электрического качания частоты переключатель РОД РАБОТЫ блока 6 переводится в положение ЭЛЕКТР, и перестройка клистрона по частоте осуществляется за счет подачи пилообразного напряжения на его отражатель. Это напряжение вырабатывается в блоке 6 схемой формирования напряжения развертки. Диапазон качания частоты гетеродина в этом режиме у
Дата добавления: 2017-01-08; просмотров: 4013;
Поиск по сайту
Узнать еще
- АВАРИИ НА АТОМНЫХ СТАНЦИЯХ
- Аддитивные и мультипликативные помехи
- БОЕВОЕ ПРИМЕНЕНИЕ СРЕДСТВ МАСКИРУЮЩИХ ПОМЕХ
- В СРЕДЕ АКТИВНЫХ ГАЗОВ
- Виды интерактивных заданий
- Внутренняя эмиссия помех; внешние источники
- Вопрос 3. Влияние неидеальности синхронизации на помехоустойчивость оптимальных приемников.
- Выбор сигналов и помехоустойчивых кодов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
