ПРИМЕНЕНИЕ ПРОТИВНИКОМ САМОЛЕТНЫХ РЛСДЛЯ НАВИГАЦИИ И ПРИЦЕЛИВАНИЯ
2.1. КЛАССИФИКАЦИЯ, ТИПЫ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РОРТОВЫХ РЛС УДАРНЫХ САМОЛЕТОВ ВЕРОЯТНЫХ ПРОТИВНИКОВ
Бортовые РЛС устанавливаются на самолетах стратегической, тактической и авианосной авиации противника. Наиболее распространены и широко используются в настоящее время обзорные и доплеровокие РЛС.
К обзорным РЛС относят станции обзора земной поверхности, многофункциональные и специальные станции. РЛС ОЗП используется для автономной навигации, бомбометания и пуска ракет класса «воздух — земля». Многофункциональные РЛС кроме задач, решаемых с помощью РЛС ОЗП, обеспечивают и управление оружием при действии по воздушным целям. Некоторые типы этих РЛС могут обеспечивать полеты на малых высотах. Специальные РЛС попользуются только для обеспечения полетов на малых высотах. Доплеровокие РЛС используются для навигации самолетов.
РЛС ОЗП дает радиолокационное изображение местности, над которой пролетает самолет, в любых метеорологических условиях, днем и ночью. Это изображение в основном соответствует географической карте местности, что дает возможность использовать РЛС ОЗП для самолетовождения, разведки наземных (надводных) объектов, прицеливания при бомбометании и пуске ракет класса «воздух — земля». Действие РЛС ОЗП основано на том, что радиоволны, излучаемые антенной станции в виде мощных импульсов, неодинаково отражаются от различных участков местности и расположенных на ней объектов.
Антенна РЛС ОЗП располагается под фюзеляжем самолета и прикрыта обтекателем из прозрачного для радиоволн материала. Антенна имеет возможность сканировать либо вкруговую, либо в секторе, последовательно облучая на земной поверхности круг, радиус которого равен дальности действия РЛС ОЗП. Излученные антенной импульсы электромагнитной энергии отражаются от земной поверхности неодновременно: сначала от участков, расположенных непосредственно под самолетом, а затем последовательно от более дальних участков.
Количество электромагнитной энергии, отраженной в сторону антенны, зависит от формы, размеров и характера неровностей облучаемой поверхности, от электрической проводимости расположенных на ней объектов и величины угла падения электромагнитных волн на поверхность. Если длина волны падающих радиоволн значительно превосходит неровности на земной поверхности, т. е. если можно считать поверхность гладкой по отношению к длине волны, и) отражение происходит по закону оптики: угол падения равен углу отражения. В этих случаях отражение является зеркальным. В гох же случаях, когда размеры неровностей земной поверхности значительно больше длины падающих радиоволн, отраженная электромагнитная энергия распространяется во все стороны, т. е, наблюдается рассеянное отражение: от различных объектов, леса и травяного покрова. Однако интенсивность отражения в каждом случае будет различной.
Гладкая водная поверхность отражает радиоволны зеркально. Вследствие этого радиоволны, падающие на нее под углом, отличным от прямого, «є отражаются обратно к антенне РЛС ОЗП. Принятые антенной отраженные сигналы преобразуются в приемном устройстве и поступают на электронно-лучевой индикатор кругового обзора; чем мощнее отраженный сигнал, тем ярче отметка на экране. Одновременно с излучением импульса электромагнитной жергии от центра экрана начинает формироваться линия развертки. Первым будет принят сигнал, отраженный от поверхности, расположенной непосредственно под самолетом. Затем последовательно придут сигналы, отраженные от удаленных объектов. Линия развертки в соответствующих местах будет иметь более яркие отметки. Импульсы электромагнитной энергии, падающей на спокойную водную поверхность под углом, отличным от прямого, отражаются зеркально и обратно к РЛС ОЗП не возвращаются. Поэтому линия развертки в этих местах не подсвечивается. При вращении антенны одновременно будет вращаться и линия развертки на экране индикатора. В процессе вращения антенна будет принимать отраженные сигналы разной интенсивности.
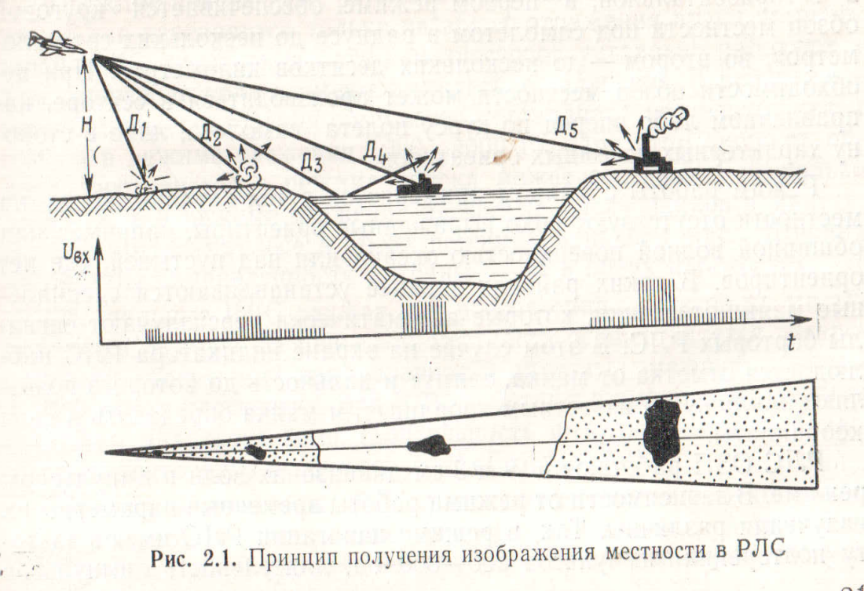
Электронно-лучевой индикатор подбирается с таким послесвечением, чтобы за время цикла кругового обзора изображение на экране не успело исчезнуть. В этом случае на экране будет наблюдаться совокупность яркостных отметок, представляющих собой радиолокационное изображение местности, расположенной под самолетом в пределах дальности действия РЛС ОЗП (рис. 2.1). Расстояние от центра экрана до каждой его точки пропорционально расстоянию от самолета до соответствующего объекта на местности, а азимут этой точки на экране соответствует направлению на объект. Для самолетовождения, разведки и бомбометания экипажу требуется рассматривать радиолокационное изображение местности на индикаторе в различных масштабах. При полете по маршруту можно, как правило, иметь изображение в мелком масштабе, так как этого обычно достаточно для общей ориентировки и выполнения расчетов по определению навигационных величин. При выходе в район цели необходимо обнаружить, опознать её и выполнить прицельное бомбометание, что может быть сделано при использовании крупного масштаба.
В различных типах PJ1C ОЗП предусматривается использование нескольких масштабов изображения местности, например: на экране РЛС применяются масштабы, равные 200, 100, 20, 10 км, и плавно изменяющийся масштаб (по желанию штурмана в пределах 10—70 км). Кроме того, предусматривается возможность просматривать удаленные от самолета объекты или участки местности в крупном масштабе. Для этой цели применяется задержка начала развертки на экране скачками.
РЛС ОЗП имеет, как правило, три режима работы: режим навигации, режим прицеливания и режим работы с маяком. С помощью косеканс-квадратной диаграммы направленности антенны, имеющей размеры 55—60° в вертикальной плоскости и 1 — 2° в горизонтальной, в первом режиме обеспечивается круговой обзор местности под самолетом в радиусе до нескольких сот километров, во втором — до нескольких десятков километров. При необходимости обзор местности может производиться в секторе, направленном либо вперед по курсу полета самолета, либо в сторону характерных наземных ориентиров.
Режим работы с маяком применяется в тех случаях, когда на местности отсутствуют ярко выраженные ориентиры, например над обширной водной поверхностью океана или над пустыней, где нет ориентиров. В таких районах заранее устанавливаются специальные маяки-ответчики, которые автоматически переизлучают сигналы бортовых РЛС. В этом случае на экране индикатора РЛС наблюдается отметка от маяка, азимут и дальность до которого позволяют экипажу по известным координатам маяка определить и свои координаты.
РЛС ОЗП работают в 2- и 3-см диапазонах волн в импульсном режиме. В зависимости от режима работы временные параметры их излучения различны. Так, в режиме навигации РЛС имеют частоту повторения импульсов 200—300 Гц, длительность импульсов 1—5 мкс, круговой обзор местности с частотой до 10 об/мин. В режиме прицеливания при бомбометании частота повторения импульсов возрастает до 1000—2000 Гц, длительность импульсов уменьшается до десятых долей микросекунды и антенна переводится в режим секторного обзора местности с частотой 40—60 качаний в минуту. В режиме работы с маяком, как правило, устанавливается стандартное значение для частоты повторения импульсов — 300 Гц, длительность импульса — 2,25 мкс и применяется секторный метод обзора местности.
Доплеровская РЛС измерения скорости и угла сноса облучает участки местности под самолетом. Антенна доплеровской РЛС имеет диаграмму направленности в виде четырех игольчатых лучей, направленных под самолет. Скорость полета самолета определяется по величине доплеровского сдвига частоты в каждом луче, а угол сноса — по разности этих сдвигов в каждой паре лучей. Эти станции работают, как правило, в течение всего времени полета самолета. Доплеровокие РЛС работают в 2—3-см диапазоне волн в импульсном режиме с частотой повторения импульсов в несколько десятков килогерц. Длительность импульса около 1 мкс. Ширина лучей диаграммы направленности антенны 3—5°. Лучи неподвижны.
Система управления оружием хвостовой установки обеспечивает своевременное обнаружение и прицельное ведение огня по атакующим истребителям. Основу системы составляет РЛС, которая имеет два режима работы: поиска и слежения. В обоих режимах РЛС работает игольчатым лучом и применяет один и тот же метод обзора пространства — обычно конический. Отличие режимов друг от друга состоит в различных скоростях и углах обзора. В режиме слежения скорость обзора значительно больше, а угол обзора значительно меньше, чем в режиме поиска.
В режиме поиска РЛС работает длительное время, в режим слежения она переводится только на время отражения атаки истребителей. РЛС управления оружием хвостовой установки работают в 3-см диапазоне волн и имеют импульсное излучение. В режиме поиска частота повторения импульсов составляет несколько сотен герц, а в режиме слежения 1000—2000 Гц. При этом скорость обзора пространства в режиме поиска может составлять несколько десятков, а в режиме слежения несколько тысяч циклов в минуту. Длительность импульса в обоих режимах меньше 1 мкс. Ширина диаграммы направленности антенны 3—4° в обеих плоскостях.
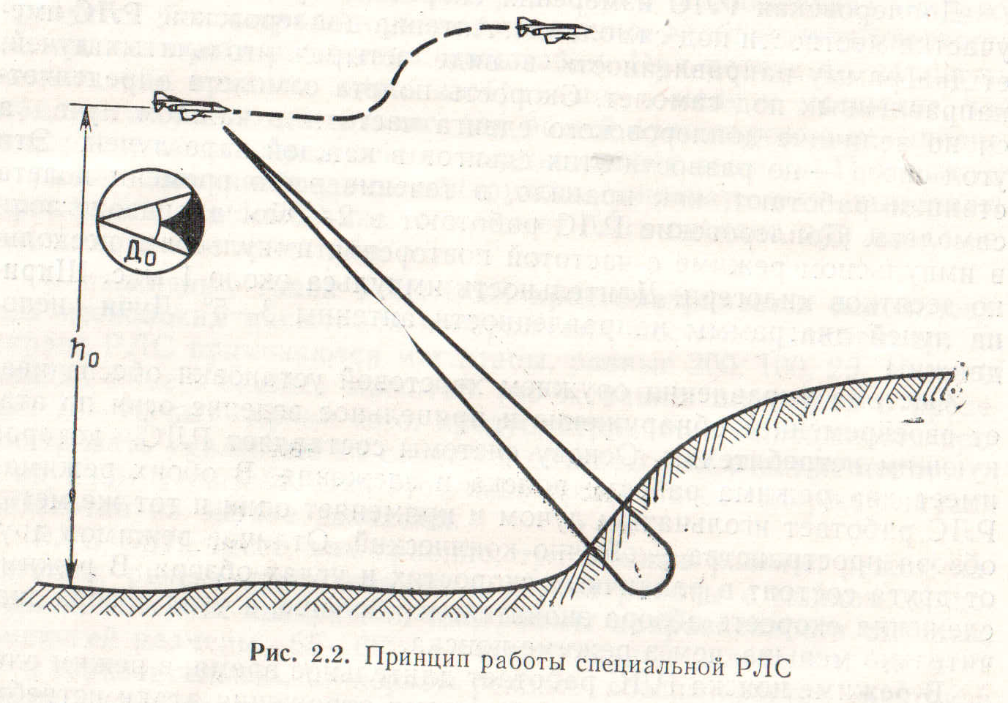
Специальные РЛС служат для обеспечения полетов на малых высотах. Слежение за рельефом местности осуществляется сигарообразной диаграммой направленности антенны, имеющей размеры 5—6° в обеих плоскостях. Эти РЛС работают в импульсном режиме в 2—3-см диапазоне волн. Длительность импульсов 0,2—0,4 мкс. Частота повторения импульсов 2—6 кГц (рис. 2.2).
Многофункциональные РЛС работают в зависимости от обстановки в одном из следующих режимов: навигации, прицеливания при бомбометании, управления оружием при стрельбе по воздушным целям, обеспечения полета на малой высоте (если для последнего не предусмотрена специальная РЛС). Они также работают в 2—3-см диапазоне волн. Временные параметры излучения, а также способы обзора пространства у многофункциональных РЛС того же порядка, что и у РЛС ОЗП, РЛС системы управления оружием хвостовой установки и специальной РЛС в соответствующих режимах.
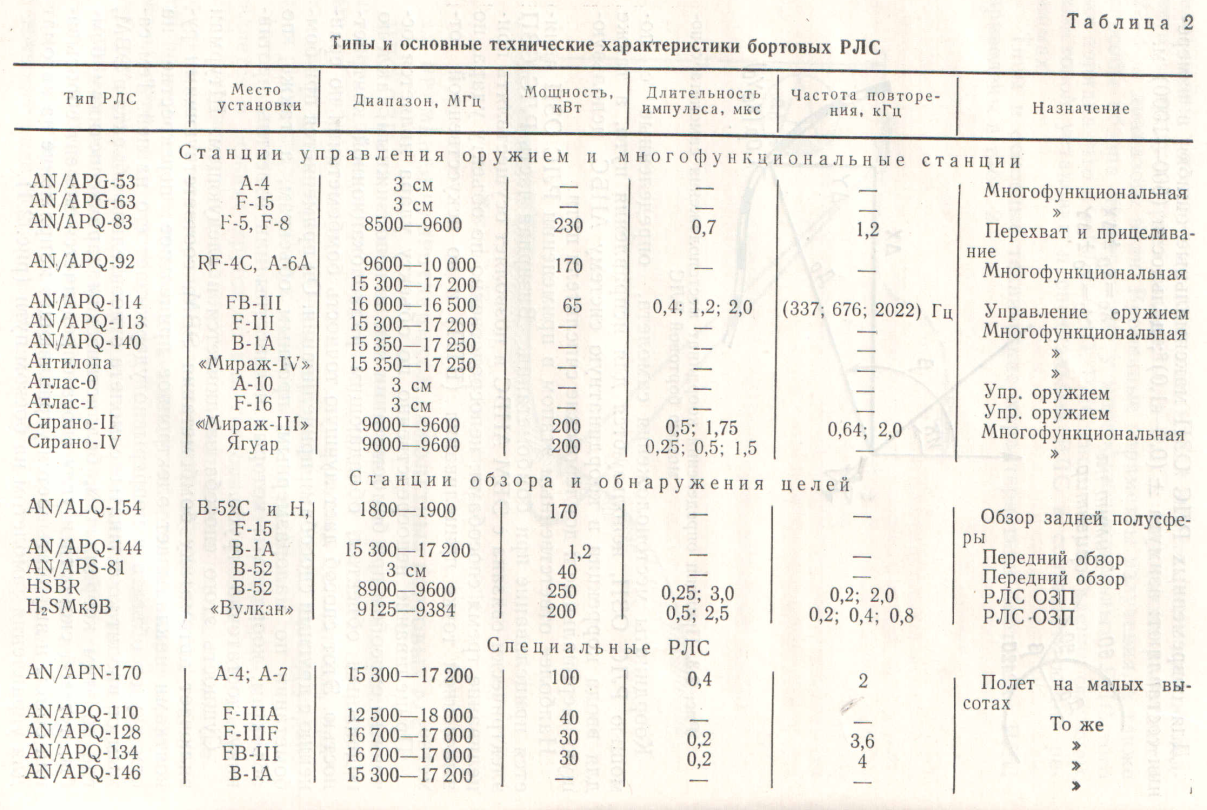
Типы и основные технические характеристики бортовых РЛС приведены в табл. 2.
2.2. ПРИМЕНЕНИЕ ПРОТИВНИКОМ САМОЛЕТНЫХ БОРТОВЫХ РЛС
РЛС ОЗП применяются для навигации по наземным радиолокационным ориентирам, коррекции координат самолета, вычисляемых по данным инерциальных и доплеровоних счислителей, прицеливания при бомбометании и коррекции бортовых систем управления ракет класса «воздух — земля» перед пуском.
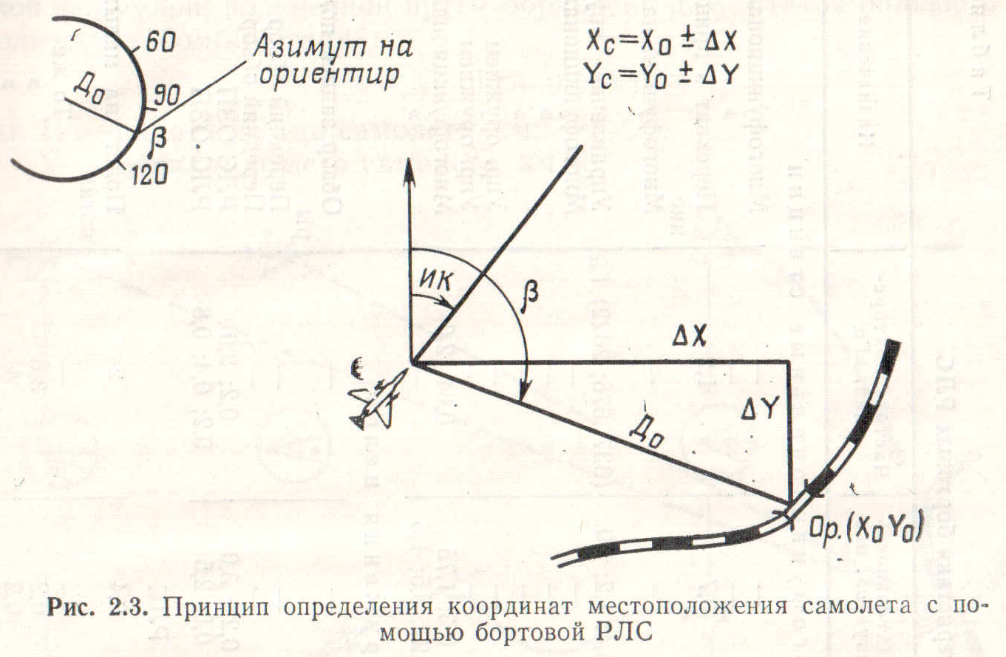
Навигация по наземным радиолокационным ориентирам осуществляется в режиме кругового или секторного обзора местности. РЛС в соответствии с планом полета включается периодически на короткое время для определения истинного местоположения самолета по заранее намеченному ориентиру, координаты которого известны, путем измерения азимута на ориентир и дальности до него (рис. 2.3). Эти данные (Д0 и р) подаются в ЭВМ, которая вычисляет истинное местоположение самолета в выбранной системе координат. Точность определения местоположения зависит от инструментальных ошибок в определении азимута и дальности, а также от точности знания координат ориентира.
Для современных РЛС ОЗП максимальные ошибки в измерении составляют: азимута ±(0,5—1,0)°; дальности (500—1000) м.
Координаты местоположения самолета, определенные с помощью РЛС ОЗП, используются для исправления пути, а также для ввода коррекции в координатную систему АНБС, использующую инерциальные и доплеровокие счислители пути.
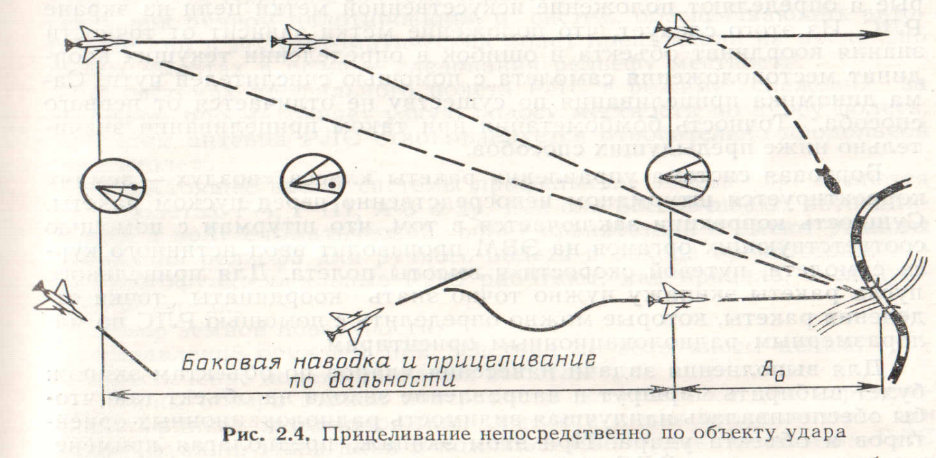
Наиболее ответственным этапом в применении РЛС ОЗП является прицеливание при бомбометании. Визирная часть РЛС ОЗП электрически связана с ЭВМ АНБС и позволяет осуществлять прицеливание тремя способами: непосредственно по объекту удара, по вынесенной точке прицеливания (ВТП) и по искусственной отметке.
Прицеливание непосредственно по объекту удара является основным способом при бомбометании как по неподвижным, так и по подвижным объектам, обладающим радиолокационной контрастностью. Этот способ дает лучшую точность бомбометания по сравнению с другими способами прицеливания. Он применяется при бомбометании по малоразмерным, прочным объектам, а также по объектам, координаты которых неизвестны или известны противнику достаточно грубо.
Сущность этого способа заключается в следующем. Штурман включает автоматику бомбометания ЭВМ, соответствующими рукоятками накладывает электронное прицельное перекрестие на отметку от объекта и непрерывно удерживает его на ней. Тем самым он вводит координаты самолета относительно объекта в ЭВМ, где по этим координатам, баллистическим характеристикам бомбы, путевой скорости и углу сноса определяется момент сбрасывания бомбы и вырабатывается управляющее напряжение на автомат для управления самолетом на боевом пути (рис. 2.4).
Точность бомбометания оценивается среднеквадратичным отклонением а, которое для данного способа определяется эмпирической формулой, полученной путем обработки результатов большого количества бомбометаний:
о = 1,5 ( ОН + 0,15V),
где Н — высота полета самолета, км; V — скорость полета самолета, км/ч.
Прицеливание по вынесенной точке дает меньшую точность бомбометания, чем предыдущий способ, и может быть применено экипажем как запасной способ в случае невозможности непосредственного прицеливания по объекту. Кроме того, прицеливание по вынесенной точке используется для нанесения бомбового удара по объекту, не обладающему радиолокационной контрастностью. Способ может быть применен только в том случае, когда координаты объекта удара и вынесенной точки прицеливания известны противнику с точностью, обеспечивающей поражение наземного объекта с заданной вероятностью. В процессе прицеливания штурман, визируя вынесенную точку прицеливания, вводит координаты самолета относительно этой точки в ЭВМ. ЭВМ по заранее введенным координатам вынесенной точки прицеливания объекта удара вырабатывает сигналы на автопилот для управления самолетом при боевой наводке и рассчитывает точку сбрасывания по введенным баллистическим характеристикам бомбы.
Точность бомбометания при прицеливании по вспомогательной точке оценивается по следующей эмпирической формуле:
°втп = о + 15ДВ,
где а—точность бомбометания при прицеливании по первому способу;
Дв — дальность выноса точки прицеливания от объекта удара, км.
Прицеливание по искусственной метке цели применяется для бомбометания по объектам, координаты которых заранее известны с высокой степенью точности. Суть этого способа сводится к тому, что ЭВМ по введенным координатам объекта и текущим координатам самолета, вычисляемым счислителями пути, вырабатывает напряжения, пропорциональные относительным координатам, которые и определяют положение искусственной метки цели на экране РЛС. Из этого следует, что положение метки зависит от точности знания координат объекта и ошибок в определении текущих координат местоположения самолета с помощью счислителей пути. Сама динамика прицеливания по существу не отличается от первого способа. Точность бомбометания при таком прицеливании значительно ниже предыдущих способов.
Бортовая система управления ракеты класса «воздух — земля» корректируется штурманом непосредственно перед пуском ракеты. Сущность коррекции заключается в том, что штурман с помощью соответствующих органов на ЭВМ производит ввод истинного курса самолета, путевой скорости и высоты полета. Для прицельного пуска ракеты экипажу нужно точно знать координаты точки отделения ракеты, которые можно определить с помощью РЛС по малоразмерным радиолокационным ориентирам.
Для выполнения задачи нанесения ударов по объектам экипаж будет выбирать маршрут и направление захода на объект так, чтобы обеспечивалась наилучшая видимость радиолокационных ориентиров и объекта удара. При этом экипаж, предполагая применение средств помех РЛС, будет включать ее на короткое время, необходимое для определения местоположения самолета, выполнения захода на объект и прицеливания.
Системы управления маловысотным полетом используются на современных ударных самолетах наряду с системами, обеспечивающими индикацию рельефа местности при ручном пилотировании. В этих системах используются как специальные, так и многофункциональные РЛС. Применяются два метода предупреждения столкновений с наземными препятствиями:
облет — преодоление препятствий с маневром в вертикальной плоскости;
обход — выполнение маневра в горизонтальной плоскости с уходом от препятствия.
Облет может выполняться вручную, автоматически и полуавтоматически. В режиме обхода препятствий, выполняемом вручную, летчик пытается максимально использовать местность для маскировки и по возможности уменьшить вертикальную перегрузку.В настоящее время оба метода основываются на использовании бортовых РЛС. Антенна РЛС сканирует по азимуту в заданном секторе для индикации рельефа местности. При этом на экране РЛС формируется изображение, в котором указывается дальность и пЗ'И'Мут незатененных участков рельефа. С помощью этого изображения летчик может выполнять как облет, так и обход наземных препятствий. Три полетах на предельно малых высотах, к которым относят высоты меньше, чем перепад высот рельефа местности, на экране РЛС формируется изображение, в котором указывается азимут профиля рельефа местности, попадающей в просматриваемую РЛС область пространства. Следует отметить, что автоматизация управления полетом на малых и предельно малых высотах идет по пути создания систем, облегчающих обход и облет препятствий при ручном пилотировании и систем, обеспечивающих автоматический и полуавтоматический облет препятствий на предельно малых высотах в режиме следования рельефу местности.
В системах профильного полета РЛС в режиме слежения за рельефом просматривает узкую полосу местности по курсу полета. При этом антенна РЛС стабилизируется относительно продольной оси самолета.
В настоящее время системы профильного полета применяются на самолетах F-4, F-III, А-6 и др. Все они обеспечивают автоматический и полуавтоматический облет препятствий и имеют режимы индикации рельефа для ручного облета и обхода препятствий.
Многофункциональные РЛС работают, как правило, в следующих режимах:
обзор земной поверхности;
управление оружием при действии по воздушным целям;
обеспечение полета на малых высотах.
Режим обзора земной поверхности используется для определения координат местоположения самолета и для прицеливания при бомбометании. Навигация с помощью многофункциональных РЛС осуществляется аналогичным образом, как это было показано для РЛС ОЗП. При использовании многофункциональных РЛС для бомбометания последние работают в двух режимах: поиска и автосопровождения.
В режиме поиска происходит обнаружение и опознавание объекта удара. В режиме автосопровождения производится разворот самолета на боевой курс, прицеливание и подготовка необходимых данных для бомбометания. При совмещении боевого курса самолета с направлением диаграммы направленности антенны на цель сканирование антенны прекращается. На удалении не более 36 км производится автоматический захват и сопровождение объекта.
При действии по воздушным целям производится поиск целей сигарообразной диаграммой направленности антенны путем ее сканирования в передней полусфере.
В режиме обеспечения полета на малой высоте ведется слежение за рельефом местности в вертикальной или одновременно в вертикальной и горизонтальной плоскостях.
Диаграмма направленности антенны в зависимости от режима работы изменяется. В режиме обзора земной поверхности диаграмма имеет такую же форму, как и у РЛС ОЗП, т. е. косеканс-квадратную. В режиме управления оружием при действии по воздушным целям и в режиме обеспечения полета на малых высотах диаграмма сигарообразная.
2.3. РУБЕЖ ВЫПОЛНЕНИЯ ЗАДАЧ ПРОТИВНИКОМ
Под рубежом выполнения задачи самолетом противника понимается рубеж, после пролета которого появление отметки на экране бортовой РЛС не обеспечивает прицельное сбрасывание бомб по объекту из-за недостатка времени на прицеливание.
Процесс прицеливания при бомбометании с использованием бортовых РЛС складывается из этапа поиска, этапа боковой наводки и этапа прицеливания по дальности.
На этапе поиска происходит обнаружение и опознавание объекта удара по индикатору бортовой РЛС. Время поиска tn равно 22—56 с у самолетов стратегической авиации и 20—40 с у самолетов тактической и авианосной авиации. После обнаружения и опознавания объекта удара начинается этап боковой наводки. В процессе этого этапа курс самолета изменяется таким образом, чтобы он проходил через объект удара. По времени te. н этот этап занимает 20—60 с у самолетов стратегической авиации и 15—20 с у самолетов тактической и авианосной авиации.
Затем самолет следует этим курсом до точки сброса бомбы. Этот этап (прицеливание до дальности) занимает по времени (<д) 20—45 с у самолетов стратегической авиации и 4—6 с у самолетов тактической и авианосной авиации (рис. 2.5).
Временные интервалы могут быть сокращены за счет совмещения этапов прицеливания. Кроме того, в течение этого времени бортовая РЛС может работать дискретно, включаясь на короткие промежутки времени со значительными паузами между ними. Схематически процесс прицеливания при бомбометании показан на рис. 2.5.
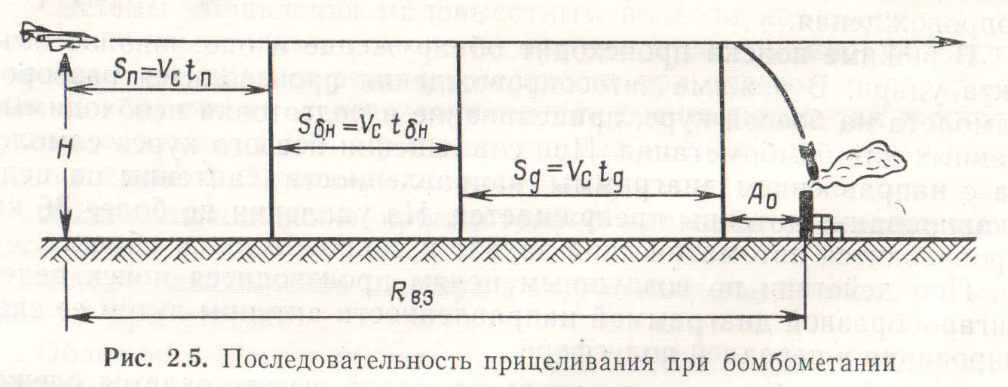
Удаление рубежа выполнения задачи самолетом противника (Rb. з) от объекта удара определяется суммой расстояний, пройденных самолетом при выполнении этапов прицеливания, и расстояния, равного относу А0 бомбы после ее отделения от самолета:
Rb. з = Vc (tn + t6. „ + Ід) + A0,где Vc — скорость полета самолета.
Относ бомбы после ее отделения от самолета определяется следующим выражением:
A-=Vt/f,
где Vc и Н — соответственно скорость и высота полета самолета; g — ускорение свободного падения.
За счет сложности радиолокационной обстановки на местности время на ориентирование, поиск, обнаружение и распознавание объекта с помощью бортовых РЛС может быть увеличено примерно в два раза.
Подавление помехами бортовых РЛС исключает или затрудняет возможность обнаружения и распознавания объектов и, следовательно, исключает или затрудняет возможность поражения объектов, местоположение которых подлежит уточнению перед бомбометанием с помощью бортовых РЛС.
Создание помех РЛС, работающих в режиме обеспечения полета на малых высотах, вынуждает воздушного противника увеличить высоту полета, что повышает эффективность применения зенитных ракетных войск и истребительной авиации.
====== Глава III =====
Дата добавления: 2017-01-08; просмотров: 3477;
Поиск по сайту
Узнать еще
- D-элементы, их применение в медицине и фармации.
- I.2.3 ПЕРВЫЙ ЗАКОН (НАЧАЛО) ТЕРМОДИНАМИКИ. ПРИМЕНЕНИЕ ПЕРВОГО ЗАКОНА ТЕРМОДИНАМИКИ К ИЗОПРОЦЕССАМ
- А. Повторное применение лекарственных веществ
- Адсорбция на твердых поверхностях и ее применение в пищевой промышленности
- Алюминиевые сплавы в строительстве. Сортамент. Виды, применение
- Апельсин общая характеристика и применение
- Ассортимент и применение швейных ниток
- Базирование по плоскости и отверстию с применением установочных пальцев.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
