Общие сведения о приводах МРС и их классификации.
| Привод (Пр)– совокупность технических устройств (в т.ч. источник движения – И. дв.) для перемещения одного или нескольких РО мрс, Þ И. дв. и РО – обязательные компоненты любого Пр. |
Классический И.дв. – это двигатель, т.е. преобразователь какой-либо энергии (электро, гидро, пневмо) в механическую энергию выходного звена (вала, штока). Иногда роль И.дв. выполняет движущаяся деталь (т.е. обладающая кинетической энергией).
Общее свойство двигателя (а значит и Пр), в том , что скорость выходного звена снижается по мере возрастания нагрузки и наоборот, т.е
где: n(  ) – скорость вращательного (поступательного) движения
) – скорость вращательного (поступательного) движения
M(F) – нагрузка при вращательном (поступательном) движении
Зависимость n = f (M) и = f (F), называемая механической характеристикой, для двигателей различных типов выражается разными математическими формулами, и соответственно – разными графиками. Наряду с другими, важнейшим показателем механической характеристики является коэффициент жёсткости её рабочего участка – (S), расположенного в диапазоне нагрузок от Мо до Мн , где:
Мо– нагрузка при идеальном холостом ходе ( Мо = 0 )
Мн– номинальная нагрузка
Мн = const = Mmax = f (  пл),
пл),
где:  пл– запланированный ресурс безаварийной работы (гарантийный срок службы)
пл– запланированный ресурс безаварийной работы (гарантийный срок службы)
При этом: S = 
где: no– скорость при идеальном холостом ходе (когда М = Мо = 0 )
nн – скорость при номинальной нагрузке (когдаМ = Мн )
Т.к no  nн , то S 0 и различно для различных типов реальных двигателей.
nн , то S 0 и различно для различных типов реальных двигателей.
В геометрическом смысле S является угловым коэффициентом для рабочего участка механической характеристики (см.. рис. 2).
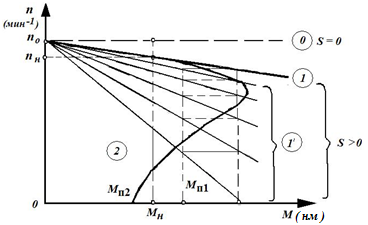
Рис.2 – Механические характеристики:
0 – идеального, а прочие – реальных электромоторов:
1 – постоянного тока с параллельным возбуждением, естественная
1’- для того же эл.мотора, пусковые (искусственные)
2 – переменного тока асинхронного, естественная
Требования к Пр. – это множество различных требований к перемещениям РО различных машин, обусловленное их назначением и спецификой рабочих условий, важнейшими из которых являются следующие три:
1. Выбор типа двигателя из множества существующих осуществляется на основе требований к жёсткости рабочего участка механической характеристики S двигателя – обязательной составной части любого Пр.
Например, для Пр. мрс это требование формулируется так:
« неизменность скорости при изменении нагрузки в широком диапазоне» и выражается условием:
no = nн = const ≠f (M) => S =  0 , - невыполнимым
0 , - невыполнимым
для реальных двигателей , для любых из которых 
Для решения этой, казалось бы, неразрешимой проблемы, установлено предельно допустимое отклонение от идеала до 10%, что позволило использовать в качестве И. дв. для Пр. мрс те из множества типов реальных двигателей, для которых
S =  0,1
0,1
(например, асинхронные трёхфазные, шунтовые электродвигатели постоянного тока и др.)
Дата добавления: 2021-04-21; просмотров: 605;
Поиск по сайту
Узнать еще
- F84 Общие расстройства развития
- II. СВЕДЕНИЯ О ВОИНСКОМ УЧЕТЕ
- III. Библиографическое описание документа. Общие требования и правила. ГОСТ 7.1-84
- IV. Направленность ППФП (общие и специальные требования)
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А) Общие определения
- А) Общие требования к составлению уравнений баланса электрической цепи
- АДСОРБЦИЯ. Общие сведения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
