Приближенное исследование стационарных нелинейных систем
Возможность применения метода гармонической линеаризации к стационарным нелинейным системам в основном определяется близостью периодического движения системы к синусоидальному. Это условие обычно удовлетворяется в случае, когда линейные части системы являются фильтрами низких частот. В качестве примера рассмотрим применение метода гармонической линеаризации для системы с одним нелинейным звеном с характеристикой F и линейной частью с передаточной функцией W(p) (рис. 4.23).
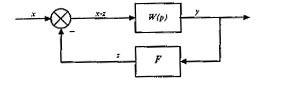
Рис. 4.23 - Одноконтурная нелинейная САУ
Предполагаем, что в нелинейной системе имеются смещенные автоколебания при x ≡ 0, поэтому представим все переменные в виде суммы постоянных составляющих и синусоидальных слагаемых с неизвестными амплитудой, частотой и начальной фазой одного из них:
y = у*+аysinω0t, z = z*+ az sin (ω0t + ψz). (4.49)
Проведем гармоническую линеаризацию нелинейного звена, т.е. зависимость z = F(y) заменим приближенной зависимостью:
z = F* + qy + (q'/ω0)  или z = F*(ay,y*) + Wн(ay,y*)y.
или z = F*(ay,y*) + Wн(ay,y*)y.
Последнюю формулу перепишем в следующем виде:
z = F*(ay,y*) + |Wн(ay,y*)|aysin(ω0t + ψн), (4.50)
где Wн(аy,y) - комплексный гармонический коэффициент усиления, ψн = argWн(ay, y*).
Выходную переменную у линейной части системы на основе принципа суперпозиции (1.1) можно представить через переменную z в следующем виде:
у = -W(0)z* -|W(iω0)|azsin[ω0t + ψz+ ψ( ω0)]. (4.51)
Из равенства правых частей формул (4.49) и (4.50) для z и в формулах (4.49) и (4.51) для у получим:
z* +azsin(ω0t + ψz) = F*(ay, y*)+|Wн(ay, y*)|aysin(ω0t + ψ), (4.52)
у*+аysinω0t = -W(0)z* -|W(iω0)|аz sin[ω0t + ψz + ψ(ω0)]. (4.53)
Сравнивая в правых и левых частях уравнений (4.52) и (4.53) постоянные составляющие, амплитуды и фазы синусоидальных составляющих, получим уравнения:
Исключая из уравнений (4.54) переменные az, z*, ψz, получим три уравнения для определения искомых переменных y*, ay, ψ0:
y*= -W(0)F*(ay,y*), (4.55)
|W(iψ0)|•|Wн(ay, y*)| = 1, (4.56)
argW(iψ0) + argWн(ay, y*) =iπ. (4.57)
Получить аналитическое решение уравнений (4.55)-(4.57) в общем виде невозможно. Для их решения применяются различные приближенные методы.
Удобно также воспользоваться графическими способами.
Рассмотрим возможные способы графического решения этой системы уравнений.
Первый способ состоит в следующем. На координатной плоскости 0у*аy (рис.4.24) по уравнению (4.55) построим кривую 1. Затем при определенных значениях ω0 задаемся значениями у* и определяем из уравнений (4.56) и (4.57) соответствующие значения аy.
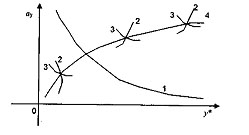
Рис. 4.24 - Графическое решение уравнений (4.54)
По результатам этих вычислений для различных конкретных значений ω0 строим кривые 2, соответствующие уравнению (4.56), и кривые 3, соответствующие уравнению (4.57). Точка пересечения кривых 2 и 3 на рис. 4.24 является совместным решением уравнений (4.56) и (4.57) для конкретного значения ω0.
Построив кривые 2 и 3 для ряда значений ω0, соединим точки их пересечения кривой 4. Точка пересечения кривой 4 и кривой 1 определяет искомые значения у* и ay, удовлетворяющие всем трем уравнениям (4.55), (4.56) и (4.57). Для определения частоты автоколебаний ω0 следует подставить найденные значения у* и ay в уравнение (4.56) или в уравнение (4.57).
Частоту автоколебаний можно также определить по шкале значений ω0, полученной на кривой 4 (рис. 4.24) при ее построении по достаточно большому числу точек. Однако этот способ менее точен, чем предыдущий.
Второй способ отличается от первого способа только приемом отыскания кривой 4 для рис. 4.24.
Объединим уравнения (4.56) и (4.57) в одно уравнение
W(iω0)Wн(ay,y*) = -1 (4.58)
и перепишем его в виде :
W(iω0) = -1/Wн(ay,y*). (4.59)
Построим на комплексной плоскости (рис. 4.25) АФХ линейной части системы W(iω) и обратную АФХ нелинейного звена со знаком "-", т.е. -1/Wн(ay,y*) для разных значений y* при изменении ω0 и аy от 0 до ∞.
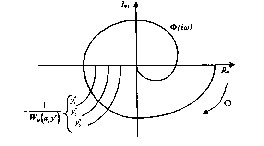
Рис. 4.25 - Графическое решение уравнения (4.59)
Точки пересечения этих характеристик определяют зависимость ау=f(y*), соответствующую уравнению (4.59), т.е. кривую 4 для рис.4.24. Далее определяем на рис. 4.24 точку ее пересечения с кривой 1, построенной по уравнению (4.55). Определяем ω0 аналогично первому способу.
Для совместного решения уравнений (4.55) - (4.57) используются также ЛЧХ.
Если не существует действительных значений у* и положительных значений аy и ω0, удовлетворяющих уравнениям (4.55)-(4.57), то автоколебания в системе невозможны.
После определения путем решения уравнений (4.55)-(4.57) параметров периодического движения системы необходимо оценить устойчивость этого движения, что подтвердит его соответствие реально существующим в системе автоколебаниям. Особенно важно это проверить при наличии нескольких периодических решений.
Для исследования устойчивости периодического движения системы можно применить первый метод Ляпунова, т.е. составить соответствующие уравнения в вариациях и исследовать устойчивость определенной ими линеаризованной системы.
Приближенно оценить устойчивость автоколебаний можно на основе следующих рассуждений.
Движение системы, близкое к найденному периодическому, можно приближенно считать синусоидальным с медленно изменяющейся амплитудой А, приближающейся к амплитуде автоколебаний ау. в случае устойчивых автоколебаний и удаляющейся от ау в случае неустойчивых автоколебаний.
Если автоколебания в системе устойчивы и имеют амплитуду ay, то при замене ее в уравнении (4.58) величиной А > ay пара чисто мнимых корней ±iω0 должна замениться парой комплексных сопряженных корней с отрицательной действительной частью, а при замене ау величиной А < ay корни ±iω0 должны замениться парой комплексных сопряженных корней с положительной действительной частью.
Для проверки характера изменения корней ±iω0 при замене в уравнении (4.58) величины ay величиной А удобно использовать критерий Найквиста.
Так как уравнение (4.58) имеет чисто мнимые корни ±iω0 при А=ау, то АФХ разомкнутой системы
Wp (iω0,ay,y) = W(iω)Wн(u,y*) (4.60)
при А = ay проходит через точку минус 1 плоскости комплексной переменной (рис. 4.26 - кривая 1).
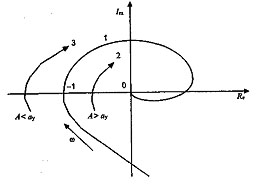
Рис. 4.26 - Проверка устойчивости автоколебаний
В случае неустойчивых автоколебаний должна наблюдаться обратная картина.
В случае полуустойчивого предельного цикла кривая (4.60) смещается в одну и ту же сторону при А > ayи при А < ay.
Дата добавления: 2021-04-21; просмотров: 571;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
