Выбор корректирующего устройства
По передаточной функции корректирующего устройства выбирают наиболее простой способ его реализации. Определяют параметры КУ по сопрягающим частотам и уточняют его ЛАЧХ. Если точную ЛАЧХ КУ отыскать не удается, необходимо использовать комбинацию из нескольких имеющихся схем КУ или выбрать наиболее близкую по форме.
Строят окончательную ЛАЧХ скорректированной системы с учетом ЛАЧХ реального КУ и определяют ее показатели качества по следующим формулам:
время переходного процесса из (4.56):
t  =
=  ; (4.57)
; (4.57)
время достижения максимума:
t  =
=  ; (4.58)
; (4.58)
запас устойчивости по фазе:
 , (4.59)
, (4.59)
где k – число интегрирующих звеньев; wi – частоты сопряжений, причем если они находятся справа от частоты среза wс, то берется знак минус, если слева – знак плюс;
перерегулирование:
 . (4.60)
. (4.60)
При выборе КУ систем электропривода с УВП следует стремиться
к реализации последовательных дифференцирующего или интегро-дифференцирующего устройств. Такая возможность обусловливается малой мощностью управления УВП, и реализация КУ возможна как с помощью пассивных, так и активных корректирующих элементов.
Если реализация последовательного КУ сложная или затруднительная, то по методике рассчитывают параллельные КУ, которые включают в обратные связи, охватывающие часть основных звеньев системы, либо производят замену одного сложного последовательного КУ двумя звеньями –последовательным и параллельным по формулам преобразования.
4.9. Моделирование и анализ переходных процессов
в замкнутой системе ТП – Д с суммирующим усилителем
Для получения переходных процессов в замкнутой системе ТП – Д
с суммирующим усилителем по полученной структурной схеме (рис. 4.1–4.4) набирают модель в программе Simulink или Sim Power System (рис. 4.9). Проводят анализ ее работоспособности в режимах пуска, реверса, наброса нагрузки, а также соответствия требованиям, приведенным в задании. Исследуют влияние на качество переходных процессов в СУЭП, изменение величин коэффициентов усилителя K  , обратных связей K
, обратных связей K  , K
, K  , K
, K  . Анализируется степень влияния корректирующего звена.
. Анализируется степень влияния корректирующего звена.
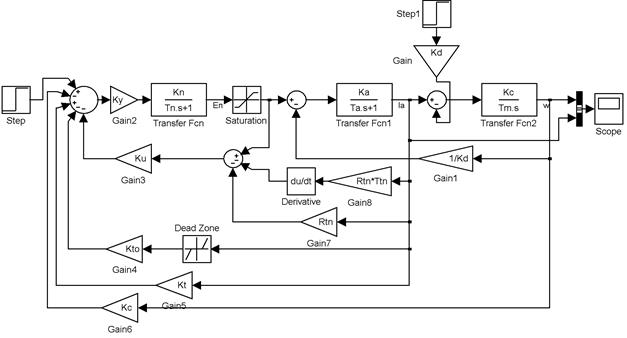
Рис. 4.9. Модель системы ТП-Д с суммирующим усилителем в Simulink
Если рассчитанная система управления электроприводом соответствует
требуемой, то по ее структурной схеме разрабатывают функциональную или принципиальную схему СУЭП.
4.10. Расчет элементов систем управления
с суммирующим усилителем
4.10.1. Функциональная схема управления
с комбинированными обратными связями
Функциональная схема системы управления с суммирующим усилителем при условном действии всех обратных связей приведена на рис. 4.10.
Рассчитывают элементы схемы для конкретной, выбранной
в пп. 4.2–4.6 системы управления. При этом обратные связи, отсутствующие
в выбранной системе, при расчете схемы (рис. 4.10) отключают.
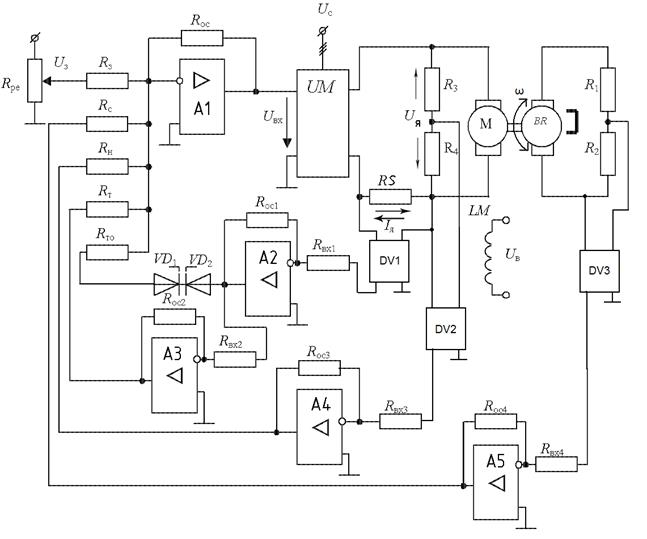
Рис. 4.10. Функциональная схема СУЭП
Исходными данными для расчета элементов СУЭП с суммирующим усилителем AW являются: коэффициенты обратных связей K , K , K  , K
, K 
и коэффициент усиления K .
Дата добавления: 2016-12-27; просмотров: 2280;
Поиск по сайту
Узнать еще
- I. Выборы: понятие, значение и виды.
- II. Особенности политического устройства Ирана
- IV. ВЫБОР НАЧАЛЬНЫХ И КОНЕЧНЫХ ПАРАМЕТРОВ ПАРА
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
- А. Электронные устройства на ОУ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
