Електропривода з урахуванням пружності
У перехідних (динамічних) режимах, всі елементи механічних ланок, до яких прикладається момент, піддаються деформаціям. Розглянемо процес передачі обертаючого моменту від двигуна до робочої машини:
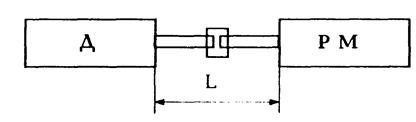
Між двигуном (Д) і робочою машиною (РМ) завжди є ділянка вала довжиною L. Представимо, що Д и РМ з'єднано гумовим валом. Коли починає обертатися Д, то спочатку відбувається скручування вала. Кінець вала з боку Д обертається, а кінець вала з боку РМ ще нерухливий. Відбувається деформація вала.
Відповідно до закону Гука, що виникають пружні моменти пропорційні кутовим деформаціям:

де С - коефіцієнт жорсткості, що для скручування має величину
 , Н×м
, Н×м
де L - довжина вала, м; G - модуль пружності, крутіння, Па.
Чим більше значення коефіцієнта твердості С, тим жорсткіше механічна частина й менше виникаюча деформація.
При С >>  рух, переданий від Д к РМ не спотворюється й механічну частину привода можна розглядати як одномасову ланку:
рух, переданий від Д к РМ не спотворюється й механічну частину привода можна розглядати як одномасову ланку:
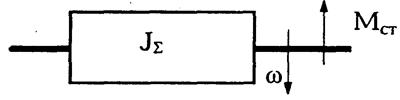
Момент інерції РМ приводиться до вала Д. Швидкості Д и РМ збігаються.
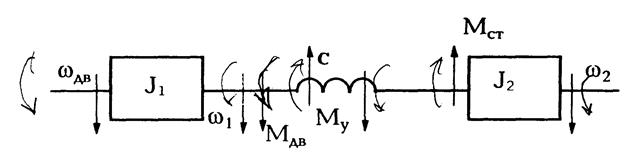
У деяких випадках коефіцієнт твердості С виявляється невеликим і деформація стає істотною. Наприклад, у конвеєрах, ШПУ. Таких мас, з'єднаних валами, може бути кілька. Аналіз таких багатомасових систем надзвичайно складний, і тому всі махові маси звичайно зводять до двох - двигуну з моментом інерції  й іншим, відділеним пружним моментом My, що має момент інерції J2.
й іншим, відділеним пружним моментом My, що має момент інерції J2.
Така механічна частина являє собою систему:
Кутова деформація пружного елемента може бути обчислена так:
Рівняння руху 1 - й маси
Рівняння руху 2-й маси
Система ДР руху 2 - х масові системи:
 ;
;
 ;
;
 ;
;
.
Структурна схема 2-х масові системи
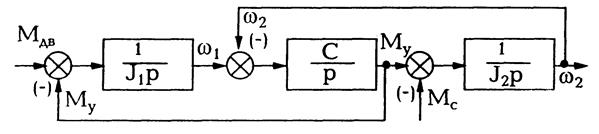
Таким чином, 2-х масова механічна система представляється структурною схемою з перехресними зворотними зв'язками, тобто має підвищену схильність до виникнення коливальних режимів.
Дата добавления: 2021-01-11; просмотров: 571;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
