Реалізація типових нелінійностей систем автоматичного регулювання на АОМ
Елементами порівняння називаються елементи або функціональні вузли, на виході яких утворяться аналогові величини, що є результатом порівняння вхідних величин. За допомогою цих елементів здійснюється перетворення аналогової інформації в цифрову.
При дослідженні систем автоматичного регулювання часто доводиться мати справа с деякими типовими нелінійністями, що характеризуються стрибкоподібними змінами коефіцієнтів передачі окремих ланок. До них ставляться:
- зона нечутливості;
- обмеження координат по модулю;
- сухе тертя;
- нелінійні характеристики;
- гістерезис;
- люфт.
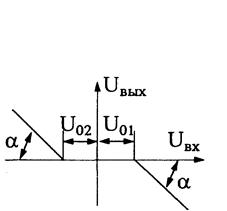
Зона нечутливості
Елемент, що має зону нечутливості, не реагує на вхідні сигнали, величина яких лежить у межах цієї зони. Широко зустрічаються (електромеханічні й релейні пристрої).
Це двигуни постійного струму - не обертається при малій напрузі живлення, меншій напруги рушання U0.
| 
|
| Характеристика | Схема моделі |
UВИХ = -(R0/R1)(UBX - U0). U0 - зона нечутливості.
U01 = "(Ra/Rб)U0П , U0П - зона нечутливості потенціометра П1.
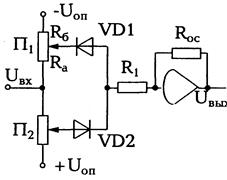
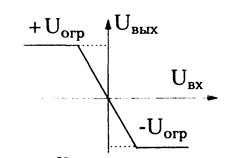
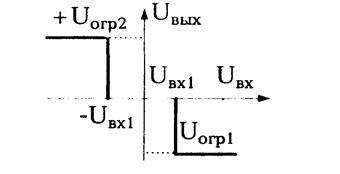
Обмеження координат по модулю
Насичення або обмеження змінної по модулю має місце в різних перетворювачах енергії, у підсилювачах, генераторах, трансформаторах.
Приклад: збільшення струму збудження генератора викликає пропорційне збільшення вихідної напруги тільки до необхідної межі, а потім наступає насичення стали магнітопроводу, і напруга генератора не збільшується.
| 
|
| Характеристика | Схема моделі |
UВИХ = - (R0/R1)Uвх
Напруга на виході підсилювача обмежується величиною
UОГР= -(Ra/Rб)Uon
При досягненні вихідною напругою величини + Uorp , або - Uorp відкривається відповідно діод Д1 або Д2, при цьому ланцюг зворотного зв'язку вирішувального підсилювача (ВП) шунтується через відкритий діод низькоомним опором відповідного потенціометра, коефіцієнт передачі підсилювача різко падає, і подальше збільшення вихідної напруги припиняється.
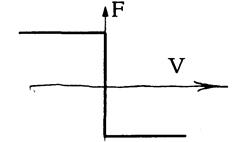
Сухе тертя
Виникає при переміщенні одного тіла по поверхні іншого, якщо між тертьовими поверхнями немає змащення. Напрямок сили тертя завжди має знак, протилежний напрямку руху.
| 
|
| Характеристика | Схема моделі |
Релейні характеристики
Можуть бути отримані, якщо до виходу схеми, що моделює зону нечутливості підключити вхід схеми, моделюючої сухе тертя.
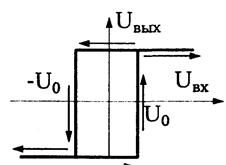
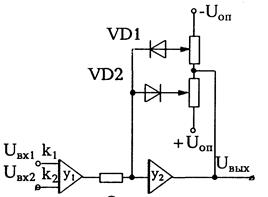
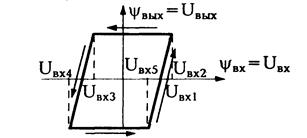
Гістерезисні характеристики
У деяких завданнях доводиться враховувати гістерезисні процеси, характеристика яких неоднозначна, тобто одному значенню вхідної величини відповідає кілька різних значень вихідний.
| 
|
| Характеристика | Схема моделі |
Два стійких стани: відкритий діод VD1 або відкритий діод VD2.
Перехід з одного стійкого стану в інше може відбуватися тільки в момент зміни знака напруги на вході другого підсилювача UBX2.
UBX2 = - (k1 UBX + k2 UBИХ) = 0
Із цього слід, що перекидання відбувається при UBX, що має фазу, протилежну вихідній напрузі, і обумовленому відношенням:
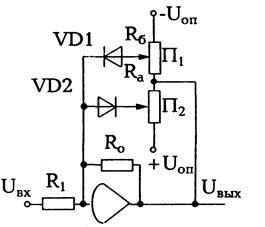
Люфт
Має місце в різних кінематичних механізмах і проявляє себе при зміні відносного руху між окремими ланками. Може несприятливо позначатися на роботі різних пристроїв.
| 
|
| Характеристика | Схема моделі |
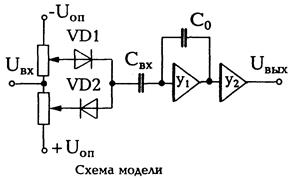
Діодні елементи схеми аналогічні елементам зони нечутливості.
1-й вирішальний підсилювач має замість резисторів конденсатори. Другий підсилювач інвертує напругу (його можна виключити).
Робота схеми: нехай UBX=0, а конденсатори виряджені. Поки UBX не досягне UBX1, діоди VD1й VD2 замкнені й UBИX=0. При збільшенні UBX, тобто коли UBX>UBXl. діод VD1відмикається й UВИХ змінюється лінійно:
Якщо при UBX = UBX2, подальше зростання UBX припинити й потім його зменшувати, то діод VD1 запирається напругою UСвх на конденсаторі Свх. Конденсатори Свх і С0, що одержали до цього заряд, будуть його зберігати. Тому що вихідна напруга підсилювача визначається напругою на конденсаторі С0, то вона при цьому залишається незмінною. Так буде доти, поки не зміниться полярність вхідної напруги. При |UBX3|<|UBX1| відімкнеться діод VD2, тому що до його аноду буде прикладена сумарна напруга UBX3 + UCBX.
При подальшій зміні вхідної напруги від UBX3 до UBX4 почнеться перезаряд конденсаторів Свх і С0. і робота схеми повториться, але вже у зворотній послідовності.
Тимчасове запізнювання
Моделювання запізнювання потрібно для рішення задач, у яких необхідно врахувати кінцеву швидкість переносу речовини або енергії.
Приклади: процеси дистанційного керування при більших відстанях; теплові процеси в енергоустановках; трубопроводи.
У кожному разі часове запізнювання приводить до зменшення ступеня стійкості систем с зворотним зв'язком.
Функція тимчасового запізнювання має вигляд:

де t - час постійного запізнювання.
В операторний формі:

Схеми запізнювання зібрані в спеціальних блоках на АОМ.
Дата добавления: 2021-01-11; просмотров: 609;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
